 |
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
A simple graphical interface for moving all the joints of a robot with sliders.
Uses remote control boards.
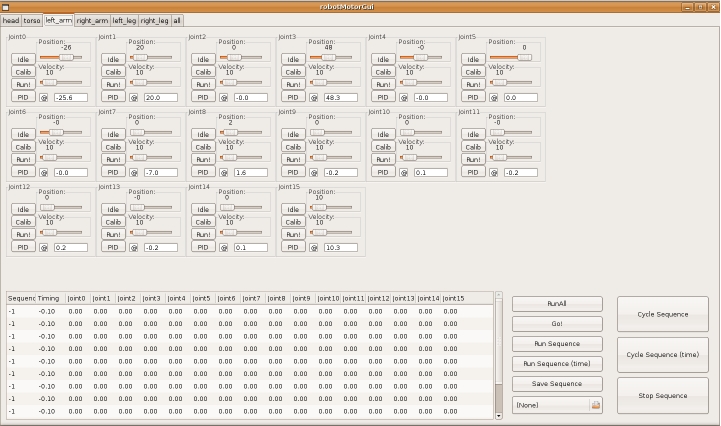
This GUI can be used for the following pouposes:
Example:
These parameters can be specified in a single file, passed with the –from option. Example:
By default yarpmotorgui starts using the file yarpmotorgui.ini in $ICUB_ROOT/app/default.
Home positions are obtained directly by the robot as specified in the Calibrator settings of the robot. It is nevertheless possible to specify custom configurations which can be executed by the corresponding menu action in the "Custom positions" submenu (present in both the Global Joints commands menu and in the single part Commands menu). A (multiple) custom position can be defined in the yarpmotorgui configuration file with the following syntax:
where {CUSTOM_POSITION_NAME} is the unique name associated to the custom configuration and {FULL_ROBOT_PART_NAME} is the name which fully specifies the robot part, e.g. "/icub/torso". Note that both Position and Velocity elements must be present, and the number of joints must match the the number of axes for the part. The following is an example of custom configuration
A set of calibration parameters can be optionally defined in the supplied file. These calibration parameters follow the same standard followed by the icub_iCubInterface and can be specified within the group part_calib:
A set of parameters can be optionally specified in order to open a set of tabs which allow cartesian movements trough the cartesian interfaces (see the tutorial icub_cartesian_interface). These cartesian interfaces can be enabled by inserting a group [cartesian] in the yarpmotorgui initialization file. This group should contain the name of the robot parts which should be controlled in the cartesian space:
Each part initialized with the cartesian interface should be properly configured by specifying the limits for the cartesian workspace.
In order to make the cartesian tabs working you need to be sure that that the Cartesian Solvers are running and working.
For each part initialized (e.g. right_leg):
For each part initialized (e.g. right_leg):
Passed with the parameter –from, configure the layout of the gui.
Creates a gui. Connects automatically to: