|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
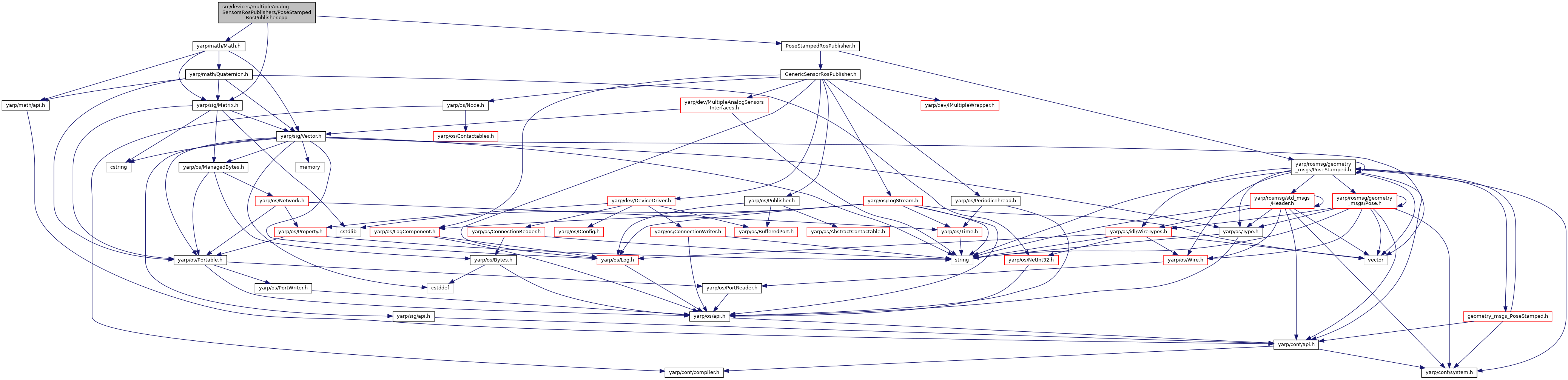
 Include dependency graph for PoseStampedRosPublisher.cpp:
Include dependency graph for PoseStampedRosPublisher.cpp:Go to the source code of this file.
Macros | |
| #define | M_PI (3.14159265358979323846) |
Functions | |
| const yarp::os::LogComponent & | GENERICSENSORROSPUBLISHER () |
| #define M_PI (3.14159265358979323846) |
Definition at line 14 of file PoseStampedRosPublisher.cpp.
| const yarp::os::LogComponent& GENERICSENSORROSPUBLISHER | ( | ) |
Definition at line 17 of file PoseStampedRosPublisher.cpp.