|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
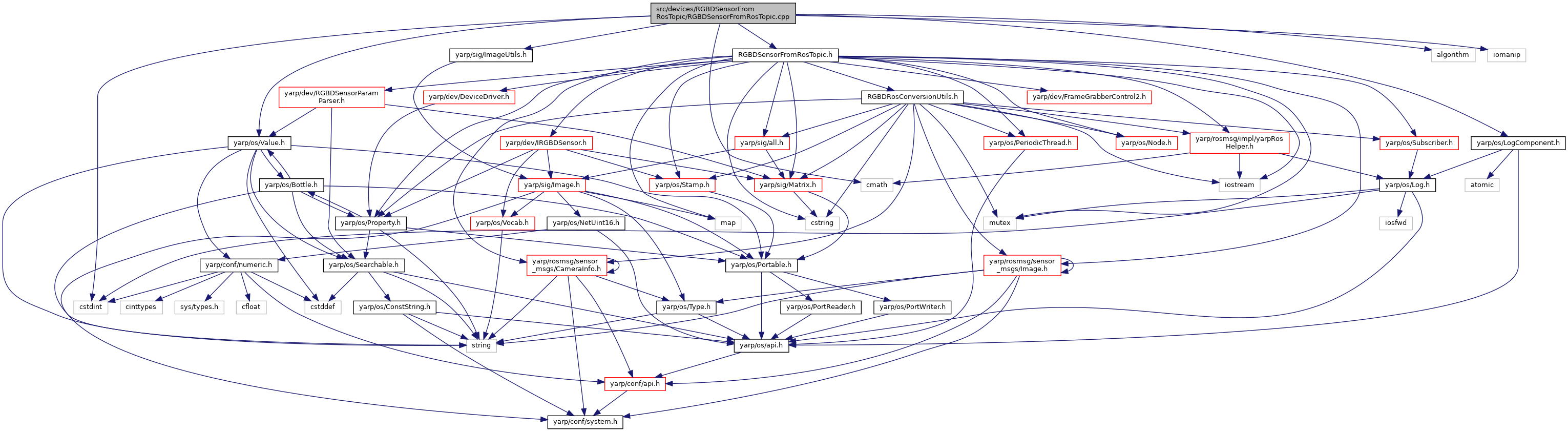
#include <cmath>#include <algorithm>#include <iomanip>#include <cstdint>#include <yarp/os/LogComponent.h>#include <yarp/os/Value.h>#include <yarp/sig/ImageUtils.h>#include "RGBDSensorFromRosTopic.h" Include dependency graph for RGBDSensorFromRosTopic.cpp:
Include dependency graph for RGBDSensorFromRosTopic.cpp: