|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
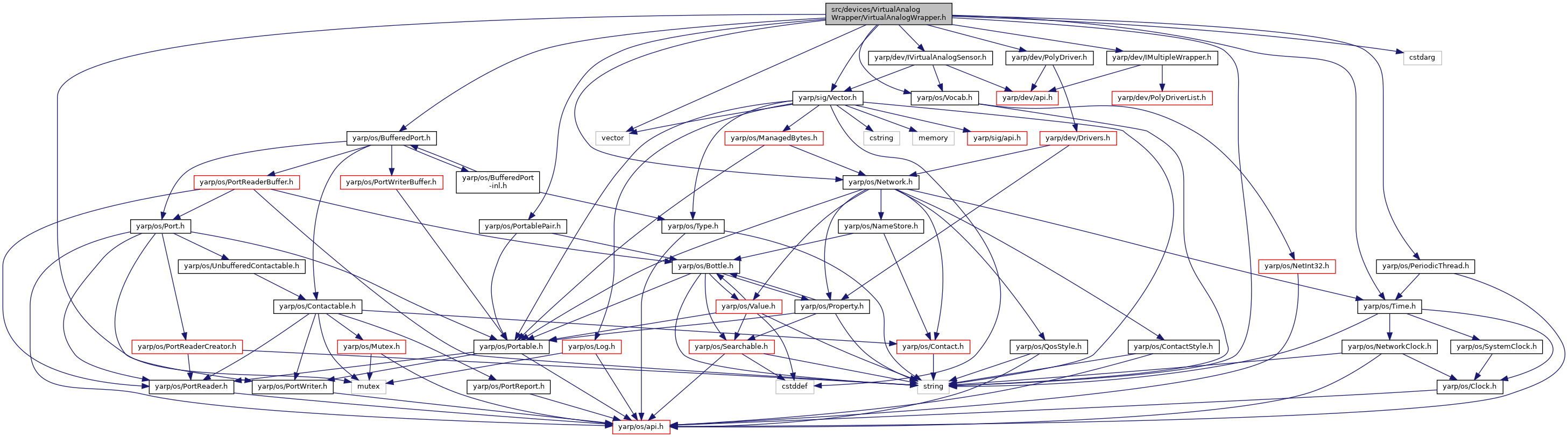
#include <yarp/os/PortablePair.h>#include <yarp/os/BufferedPort.h>#include <yarp/os/Time.h>#include <yarp/os/Network.h>#include <yarp/os/PeriodicThread.h>#include <yarp/os/Vocab.h>#include <yarp/dev/PolyDriver.h>#include <yarp/sig/Vector.h>#include <yarp/dev/IMultipleWrapper.h>#include <yarp/dev/IVirtualAnalogSensor.h>#include <mutex>#include <string>#include <vector>#include <cstdarg> Include dependency graph for VirtualAnalogWrapper.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for VirtualAnalogWrapper.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | VirtualAnalogWrapper |
virtualAnalogServer: An analog wrapper for virtual device A virtual device is a software emulated device, for example force-torque computed from a real sensor and then relocated to another part of the robot or some kind of estimated measurement needed by the robot. More... | |
| class | AnalogSubDevice |