 |
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
When developing applications performances are affected by the available resources. This sounds like an obvious statement but it is often overlooked by users. In robotics developers should be concerned with communication latency and, perhaps more importantly, its jitter.
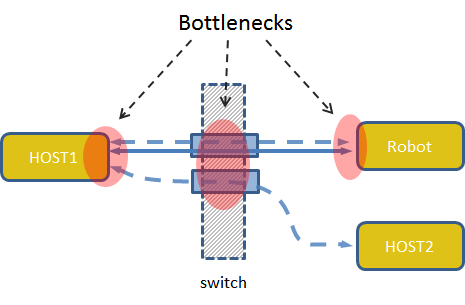
In a distributed system there are potential sources of bottlenecks. First of all, communication suffers if there is insufficient CPU time to delivery or retrieve messages. When using network protocols messages are queued on the network card and network switch. The situation is depicted in the figure below. Individual connections in YARP compete to get CPU time and network resources. When many components begin loading the available CPUs and using bandwidth performance may suffer.
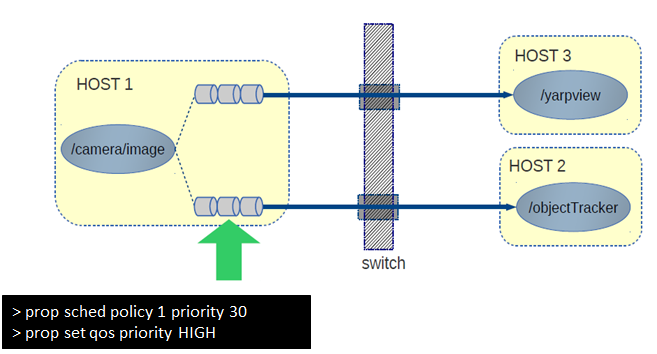
YARP allows users to assign priorities to connections. Connections with higher priority receive more CPU time and travel faster on the network, resulting in lower latency and more deterministic behavior.
Prioritization works by increasing the priority of threads that are serving a given connection and by assigning QoS parameters to the packets so that they receive higher priority when they traverse the network (the network card and network switch).
Channel prioritization has been experimentally validated in [5] and [6] showing how it allows reducing latency and improving determinism for selected communication channels.
Suppose you want to modify the priority of the connection between /sender and /receiver.
Firstly you can select the scheduling policy and priority for the thread that manages the communication.
$ yarp admin rpc /sender
>> prop set /receiver (sched
((policy SCHED_FIFO)
(priority 30)))
The first line "yarp admin rpc" opens an administrative session with the port object of /sender. The second line is the real command to the administrative port. It adjusts the scheduling policy and priority of the thread in /sender which handles the connection to /receiver respectively to SCHED_FIFO and 30 on Linux machines (scheduling parameters are OS specific).
Analogously, data packet priority can be configured via administrative commands by setting one of the predefined priority classes:
$ yarp admin rpc /sender >> prop set /receiver (qos ((priority HIGH)))
This simply sets the outbound packets priority to HIGH for the connection from /sender to /receiver. The priority band affects the TOS/DSCP in the IP packets and the queuing policy used by the OS. Possible values are LOW, NORMAL, HIGH and CRITICAL.
These two set of parameters can be set for every channel in the same way and jointly define the actual priority of a communication channel in a YARP network.