|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
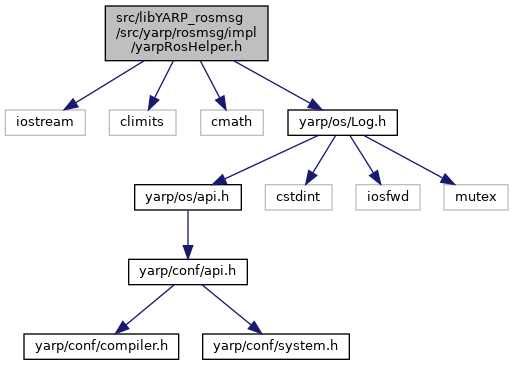
 Include dependency graph for yarpRosHelper.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for yarpRosHelper.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Enumerations | |
| enum | ROSTopicUsageType { ROS_config_error, ROS_disabled, ROS_enabled, ROS_only } |
Functions | |
| double | convertDegreesToRadians (double degrees) |
| convert degrees to radiants for ROS messages More... | |
| void | convertDegreesToRadians (std::vector< yarp::os::NetFloat64 > °rees) |
| bool | convertEulerAngleYXZrads_to_quaternion (double *eulerXYZ, double *quaternion) |
| bool | convertEulerAngleYXZdegrees_to_quaternion (double *eulerXYZ, double *quaternion) |
Variables | |
| constexpr double | PI = 3.1415926535897932384626433 |
| enum ROSTopicUsageType |
| Enumerator | |
|---|---|
| ROS_config_error | |
| ROS_disabled | |
| ROS_enabled | |
| ROS_only | |
Definition at line 18 of file yarpRosHelper.h.
|
inline |
convert degrees to radiants for ROS messages
Definition at line 30 of file yarpRosHelper.h.
|
inline |
Definition at line 35 of file yarpRosHelper.h.
|
inline |
Definition at line 69 of file yarpRosHelper.h.
|
inline |
Definition at line 42 of file yarpRosHelper.h.
|
constexpr |
Definition at line 27 of file yarpRosHelper.h.