|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
define control board standard interfaces More...
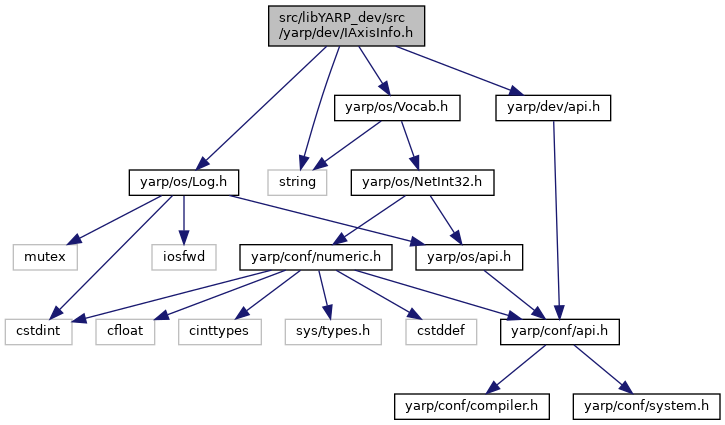
 Include dependency graph for IAxisInfo.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for IAxisInfo.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | yarp::dev::IAxisInfo |
| Interface for getting information about specific axes, if available. More... | |
| class | yarp::dev::IAxisInfoRaw |
| Interface for getting information about specific axes, if available. More... | |
Namespaces | |
| yarp | |
| The main, catch-all namespace for YARP. | |
| yarp::dev | |
| An interface for the device drivers. | |
Enumerations | |
| enum | yarp::dev::JointTypeEnum { yarp::dev::VOCAB_JOINTTYPE_REVOLUTE = yarp::os::createVocab('a', 't', 'r', 'v'), yarp::dev::VOCAB_JOINTTYPE_PRISMATIC = yarp::os::createVocab('a', 't', 'p', 'r'), yarp::dev::VOCAB_JOINTTYPE_UNKNOWN = yarp::os::createVocab('u', 'n', 'k', 'n') } |
Variables | |
| constexpr yarp::conf::vocab32_t | VOCAB_INFO_NAME = yarp::os::createVocab('n','a','m','e') |
| constexpr yarp::conf::vocab32_t | VOCAB_INFO_TYPE = yarp::os::createVocab('t','y','p','e') |
define control board standard interfaces
Definition in file IAxisInfo.h.
|
constexpr |
Definition at line 92 of file IAxisInfo.h.
|
constexpr |
Definition at line 93 of file IAxisInfo.h.