|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
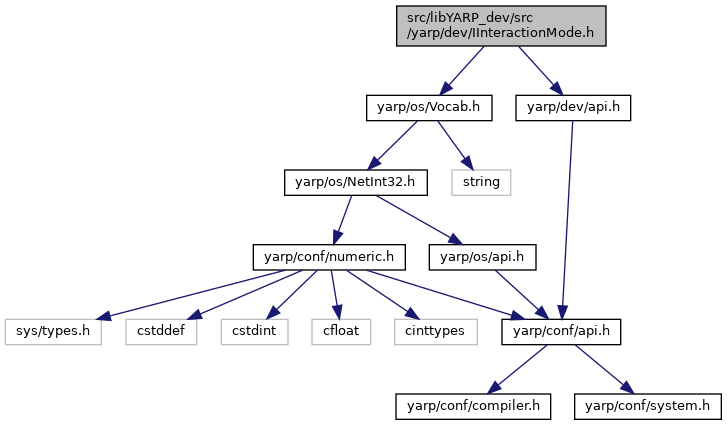
 Include dependency graph for IInteractionMode.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for IInteractionMode.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | yarp::dev::IInteractionMode |
| Interface settings the way the robot interacts with the environment: basic interaction types are Stiff and Compliant. More... | |
| class | yarp::dev::IInteractionModeRaw |
| Interface settings the way the robot interacts with the environment: basic interaction types are Stiff and Compliant. More... | |
Namespaces | |
| yarp | |
| The main, catch-all namespace for YARP. | |
| yarp::dev | |
| An interface for the device drivers. | |
Enumerations | |
| enum | yarp::dev::InteractionModeEnum { yarp::dev::VOCAB_IM_STIFF = yarp::os::createVocab('s','t','i','f'), yarp::dev::VOCAB_IM_COMPLIANT = yarp::os::createVocab('c','o','m','p'), yarp::dev::VOCAB_IM_UNKNOWN = yarp::os::createVocab('u','n','k','n') } |
Variables | |
| constexpr yarp::conf::vocab32_t | VOCAB_INTERFACE_INTERACTION_MODE = yarp::os::createVocab('i','n','t','m') |
| constexpr yarp::conf::vocab32_t | VOCAB_INTERACTION_MODE = yarp::os::createVocab('m','o','d','e') |
| constexpr yarp::conf::vocab32_t | VOCAB_INTERACTION_MODE_GROUP = yarp::os::createVocab('m','o','d','g') |
| constexpr yarp::conf::vocab32_t | VOCAB_INTERACTION_MODES = yarp::os::createVocab('m','o','d','s') |
|
constexpr |
Definition at line 30 of file IInteractionMode.h.
|
constexpr |
Definition at line 31 of file IInteractionMode.h.
|
constexpr |
Definition at line 32 of file IInteractionMode.h.
|
constexpr |
Definition at line 29 of file IInteractionMode.h.