|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
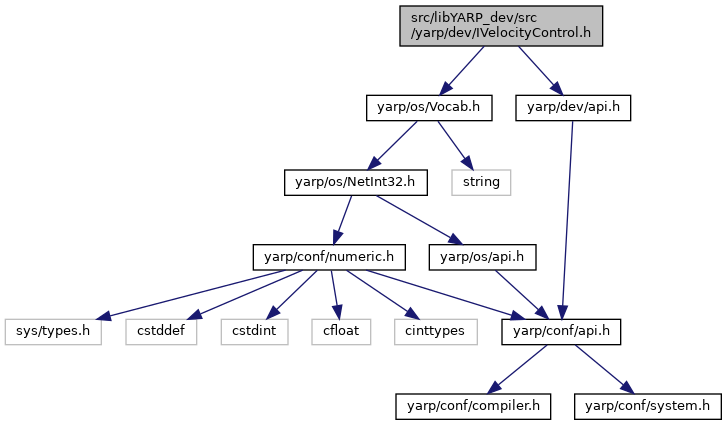
 Include dependency graph for IVelocityControl.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for IVelocityControl.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | yarp::dev::IVelocityControlRaw |
| Interface for control boards implementig velocity control in encoder coordinates. More... | |
| class | yarp::dev::IVelocityControl |
| Interface for control boards implementing velocity control. More... | |
Namespaces | |
| yarp | |
| The main, catch-all namespace for YARP. | |
| yarp::dev | |
| An interface for the device drivers. | |
Variables | |
| constexpr yarp::conf::vocab32_t | VOCAB_VELOCITY_MOVE_GROUP = yarp::os::createVocab('v','m','o','g') |
| constexpr yarp::conf::vocab32_t | VOCAB_VEL_PID = yarp::os::createVocab('v','p','d') |
| constexpr yarp::conf::vocab32_t | VOCAB_VEL_PIDS = yarp::os::createVocab('v','p','d','s') |
|
constexpr |
Definition at line 303 of file IVelocityControl.h.
|
constexpr |
Definition at line 304 of file IVelocityControl.h.
|
constexpr |
Definition at line 302 of file IVelocityControl.h.