|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
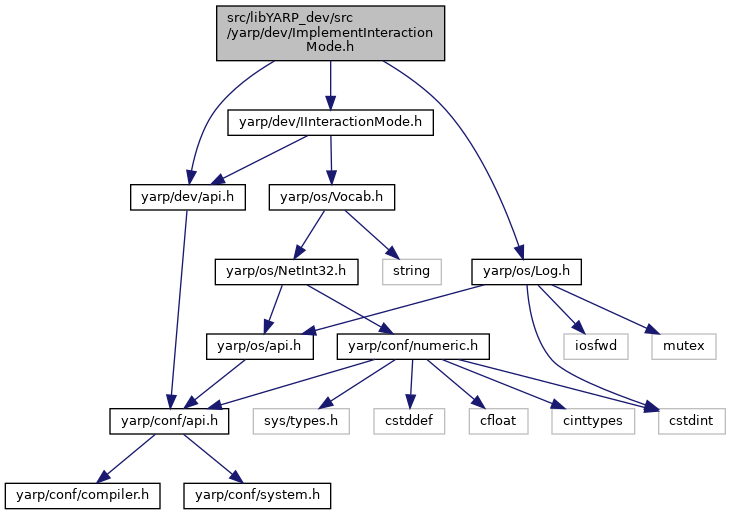
 Include dependency graph for ImplementInteractionMode.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ImplementInteractionMode.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | yarp::dev::ImplementInteractionMode |
| Interface settings the way the robot interacts with the environment: basic interaction types are Stiff and Compliant. More... | |
| class | yarp::dev::StubImplInteractionModeRaw |
| Stub implementation of IInteractionMode interface. More... | |
Namespaces | |
| yarp | |
| The main, catch-all namespace for YARP. | |
| yarp::dev | |
| An interface for the device drivers. | |
| yarp::dev::impl | |