|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
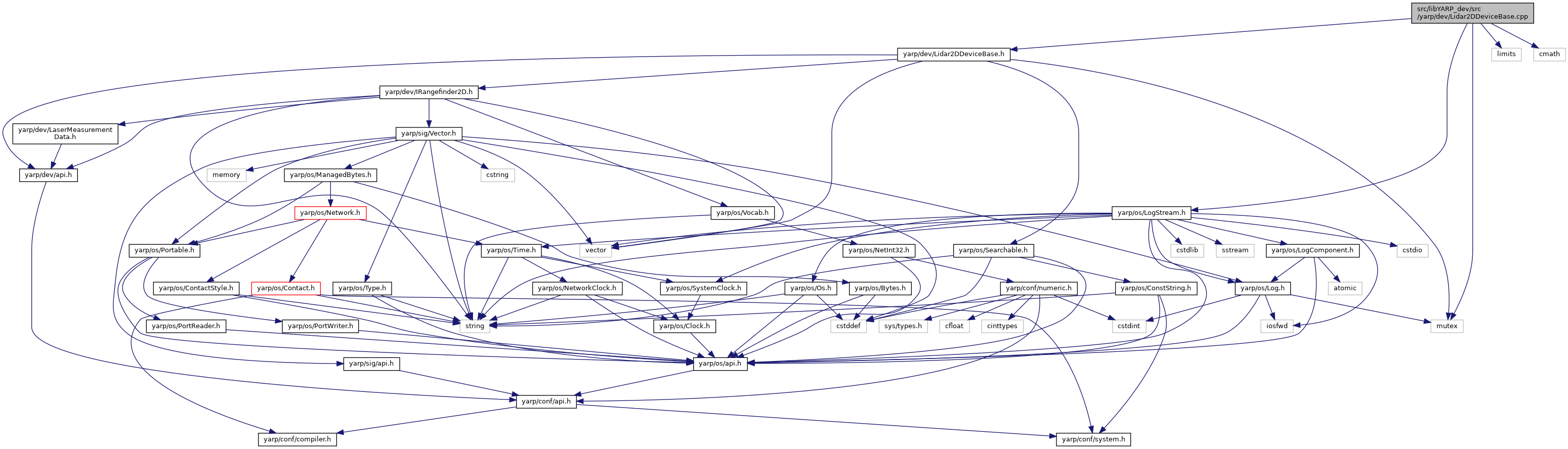
#include <yarp/dev/Lidar2DDeviceBase.h>#include <yarp/os/LogStream.h>#include <mutex>#include <limits>#include <cmath> Include dependency graph for Lidar2DDeviceBase.cpp:
Include dependency graph for Lidar2DDeviceBase.cpp:Go to the source code of this file.
Macros | |
| #define | _USE_MATH_DEFINES |
| #define | DEG2RAD M_PI/180.0 |
Functions | |
| const yarp::os::LogComponent & | LASER_BASE () |
| #define _USE_MATH_DEFINES |
Definition at line 9 of file Lidar2DDeviceBase.cpp.
| #define DEG2RAD M_PI/180.0 |
Definition at line 22 of file Lidar2DDeviceBase.cpp.
| const yarp::os::LogComponent& LASER_BASE | ( | ) |
Definition at line 25 of file Lidar2DDeviceBase.cpp.