|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
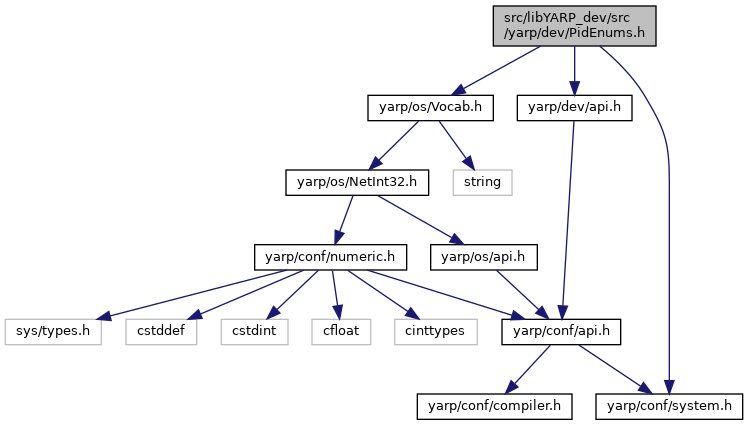
 Include dependency graph for PidEnums.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for PidEnums.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Namespaces | |
| yarp | |
| The main, catch-all namespace for YARP. | |
| yarp::dev | |
| An interface for the device drivers. | |
Enumerations | |
| enum | yarp::dev::PidControlTypeEnum { yarp::dev::VOCAB_PIDTYPE_POSITION = yarp::os::createVocab('p', 'o', 's'), yarp::dev::VOCAB_PIDTYPE_VELOCITY = yarp::os::createVocab('v', 'e', 'l'), yarp::dev::VOCAB_PIDTYPE_TORQUE = yarp::os::createVocab('t', 'r', 'q'), yarp::dev::VOCAB_PIDTYPE_CURRENT = yarp::os::createVocab('c', 'u', 'r') } |
| enum | yarp::dev::PidFeedbackUnitsEnum { yarp::dev::PidFeedbackUnitsEnum::RAW_MACHINE_UNITS = 0, yarp::dev::PidFeedbackUnitsEnum::METRIC = 1 } |
| enum | yarp::dev::PidOutputUnitsEnum { yarp::dev::PidOutputUnitsEnum::RAW_MACHINE_UNITS = 0, yarp::dev::PidOutputUnitsEnum::DUTYCYCLE_PWM_PERCENT = 1, yarp::dev::PidOutputUnitsEnum::POSITION_METRIC = 2, yarp::dev::PidOutputUnitsEnum::VELOCITY_METRIC = 3, yarp::dev::PidOutputUnitsEnum::TORQUE_METRIC = 4, yarp::dev::PidOutputUnitsEnum::CURRENT_METRIC = 5 } |