|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
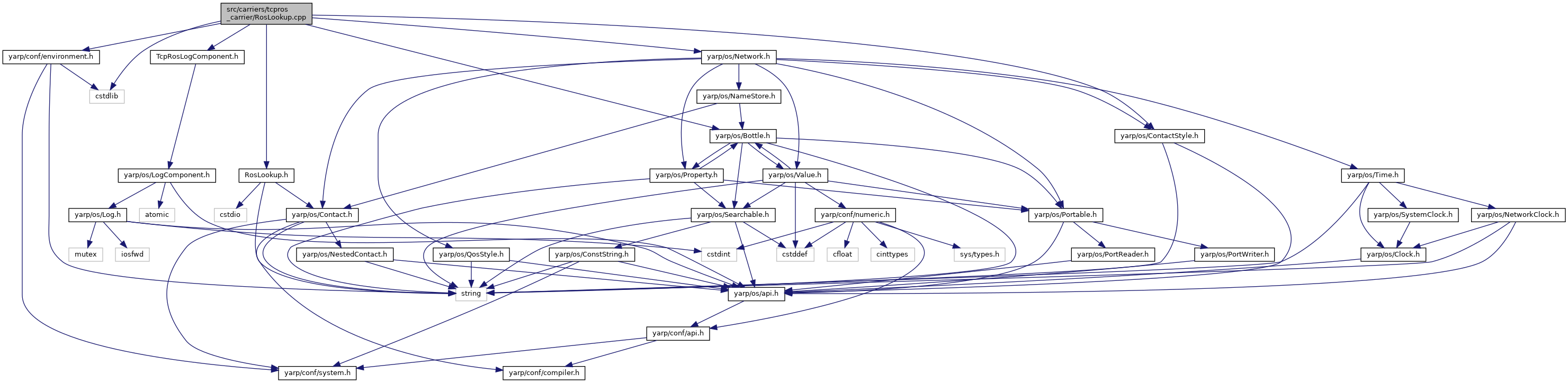
#include "RosLookup.h"#include "TcpRosLogComponent.h"#include <yarp/conf/environment.h>#include <yarp/os/Bottle.h>#include <yarp/os/ContactStyle.h>#include <yarp/os/Network.h>#include <cstdlib> Include dependency graph for RosLookup.cpp:
Include dependency graph for RosLookup.cpp:Go to the source code of this file.
Functions | |
| static bool | rpc (const Contact &c, const char *carrier, Bottle &writer, Bottle &reader) |
|
static |
Definition at line 22 of file RosLookup.cpp.