|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
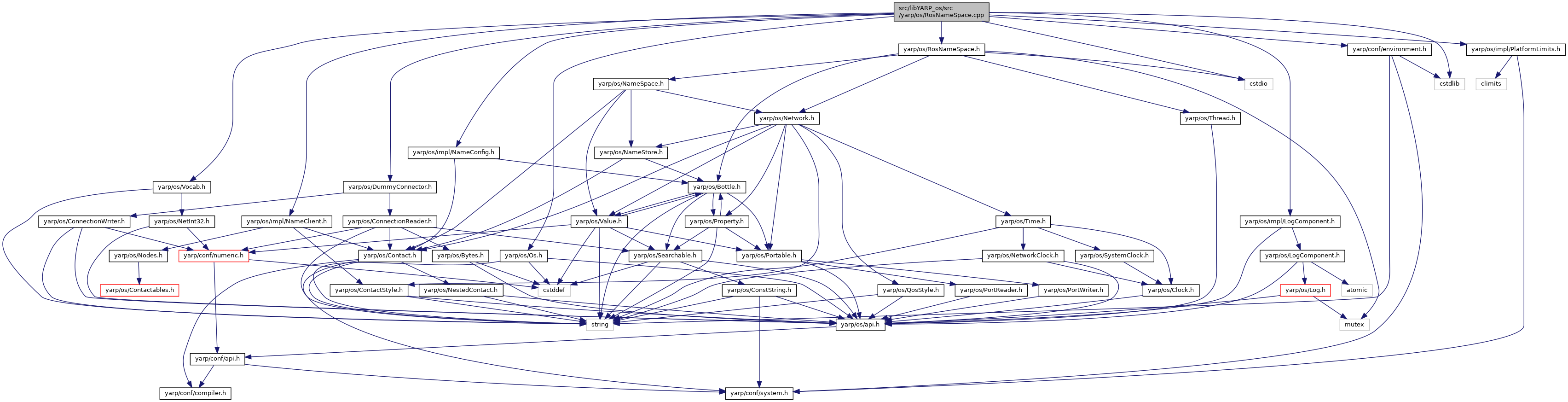
#include <yarp/os/RosNameSpace.h>#include <yarp/conf/environment.h>#include <yarp/os/DummyConnector.h>#include <yarp/os/Os.h>#include <yarp/os/Vocab.h>#include <yarp/os/impl/LogComponent.h>#include <yarp/os/impl/NameClient.h>#include <yarp/os/impl/NameConfig.h>#include <yarp/os/impl/PlatformLimits.h>#include <cstdio>#include <cstdlib> Include dependency graph for RosNameSpace.cpp:
Include dependency graph for RosNameSpace.cpp: