|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
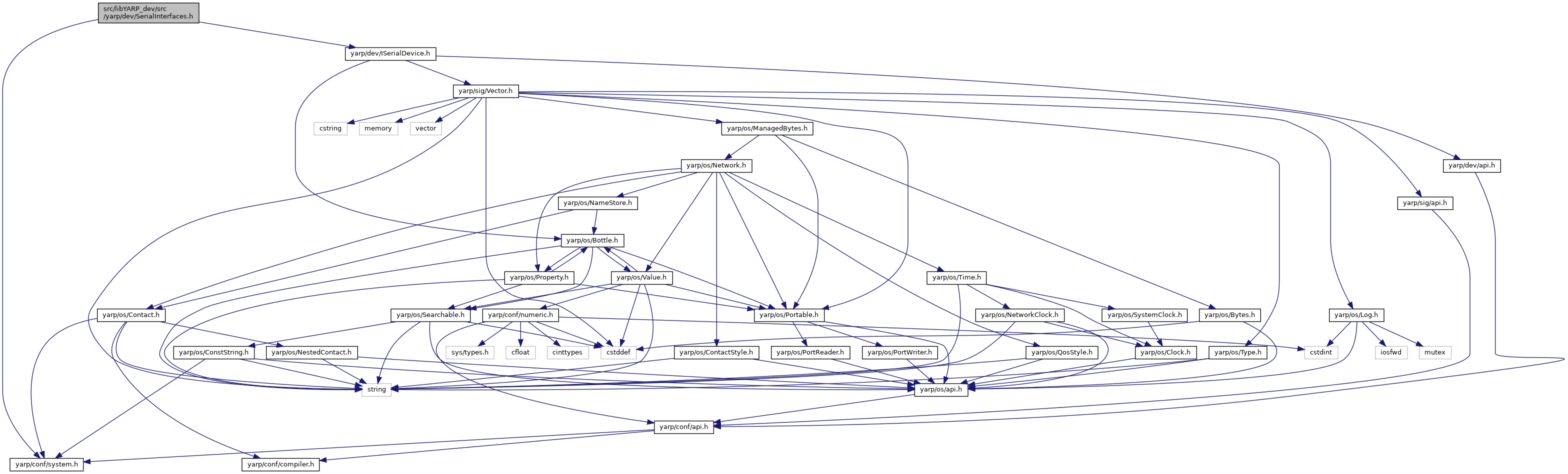
 Include dependency graph for SerialInterfaces.h:
Include dependency graph for SerialInterfaces.h: