 |
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
The first step is to have the yarpserver running.
At a terminal type:
Depending on your system the console will look something like this:
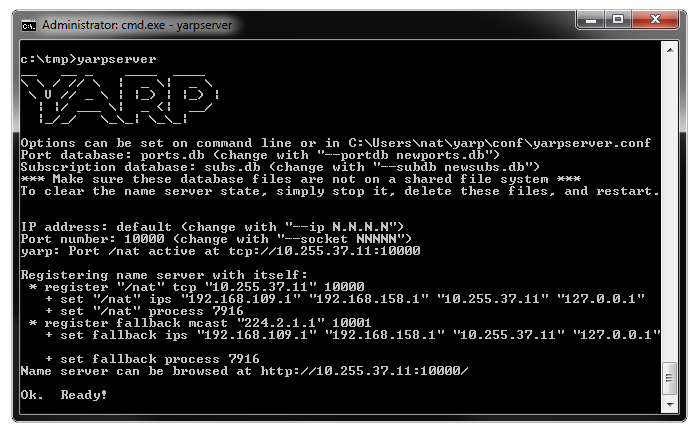
If you type on a web browser http://127.0.0.1:10000 you get information about the name server (registered ports, info, etc.).
We can just check functionality by running a simple example. On another terminal type:
on a third terminal:
and on yet another terminal:
you'll see the effect on the name server:
Now, anything typed on the YARP write will be sent and printed on the read side.
You can also use the yarpdataplayer to replay a recorded sequence. This will reproduce all the sensory information available on the real robot during a simple experiment. Follow the instructions here:
yarpdataplayer example application

You are now ready to learn more, proceed to the YARP Tutorials.