|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
Re-play a recorded sequence from the robot
This application demonstrates how to re-play a recorded sequence from the robot using the module yarpdataplayer. To visualize the state of the robot we will use two viewers (yarpview) and the iCubGui.
No special dependencies are required, all the required modules will be executed by the application. Since yarpdataplayer will open ports with the same name as the real robot/simulator make sure they are not running (or that you start an instance of the nameserver with your own namespace).
This example uses the iCubGui from the iCub Software Repository Make sure you compiled yarpview and yarpdataplayer (in YARP) and the iCubGui in iCub) if you want to execute this tutorial on your computer.
Download example sequence. This sequence was recorded while the iCub was tracking and grasping a red ball:
Use this link if you have opencv installed (images are jpg compressed 46MB zipped).
Use this link if you do not have opencv installed (images are ppm 642MB zipped).
Unpack the content of the archive in a directory of your choice, e.g. /home/\<user\>. You should now have a directory called testData_20120803_095402 in /home/\<user\>.
On a console run yarpserver (if not already running).
You can run yarpmanager:
Inside the application folder in the yarpmanager gui you should see an entry called yarpdataplayer_example, double click and open it.
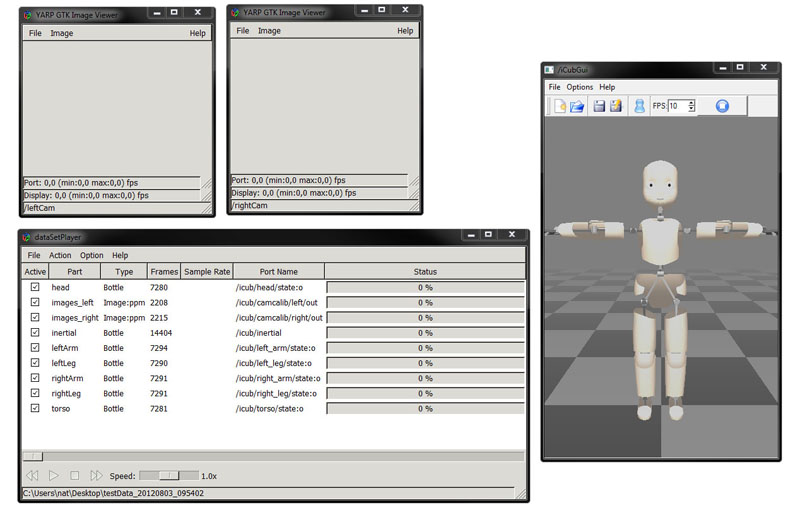
Now you are ready to run the application. Hit the run button. For windows should open like this:
In the yarpdataplayer window select File->Open Directory.
And browse to the directory where you unpacked the example sequence, select the directory testData_20120803_095402.
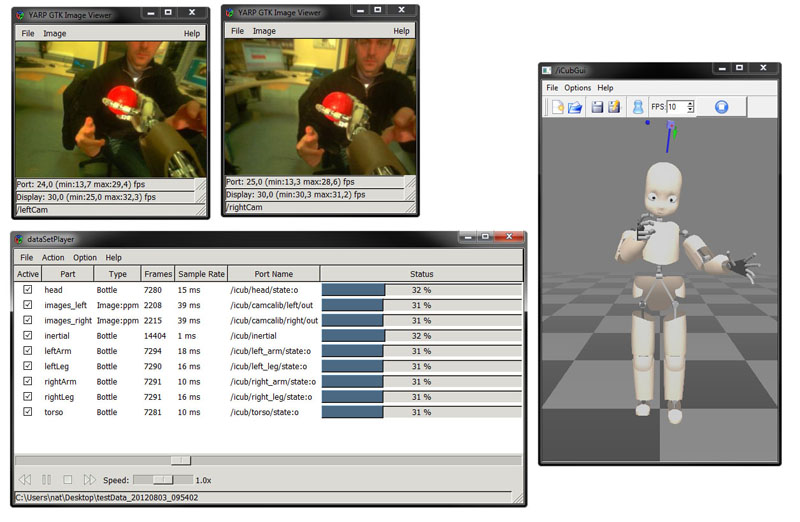
Now you can connect the modules (notice that this cannot be done before the sequence is loaded in the yarpdataplayer), hit connect on the yarpmanager gui.
You can now use the yarpdataplayer to play the sequence (all commands should be pretty intuitive). The output will be something like this: