|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
#include <yarp/os/PortWriterBufferBase.h>
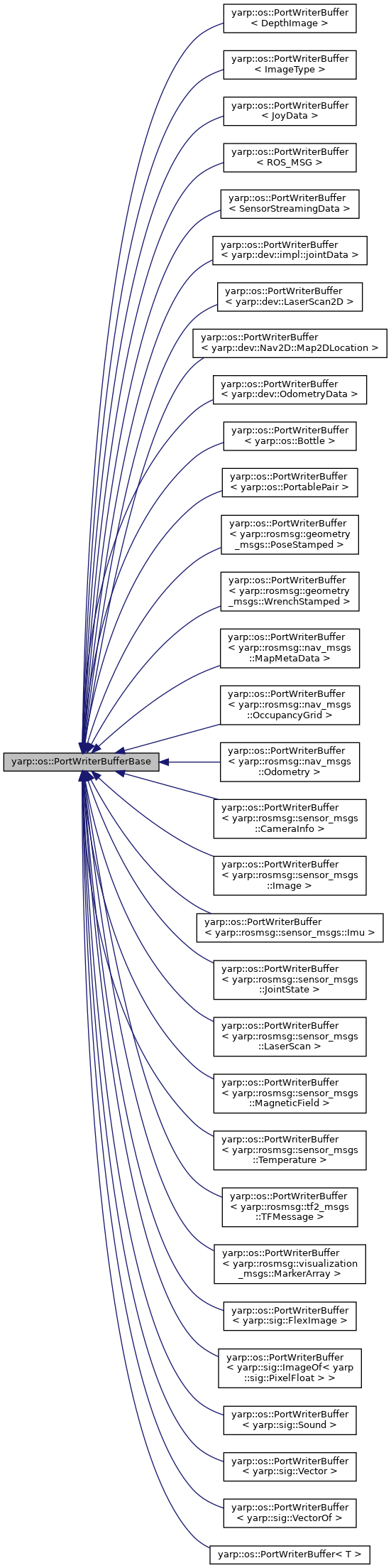
 Inheritance diagram for yarp::os::PortWriterBufferBase:
Inheritance diagram for yarp::os::PortWriterBufferBase:Classes | |
| class | Private |
Public Member Functions | |
| PortWriterBufferBase () | |
| virtual | ~PortWriterBufferBase () |
| virtual PortWriterWrapper * | create (PortWriterBufferManager &man, void *tracker)=0 |
| const void * | getContent () const |
| bool | releaseContent () |
| int | getCount () |
| void | attach (Port &port) |
| void | detach () |
| void | write (bool strict) |
| void | waitForWrite () |
Definition at line 39 of file PortWriterBufferBase.h.
| PortWriterBufferBase::PortWriterBufferBase | ( | ) |
Definition at line 184 of file PortWriterBufferBase.cpp.
|
virtual |
Definition at line 189 of file PortWriterBufferBase.cpp.
| void PortWriterBufferBase::attach | ( | Port & | port | ) |
Definition at line 210 of file PortWriterBufferBase.cpp.
|
pure virtual |
Implemented in yarp::os::PortWriterBuffer< T >, yarp::os::PortWriterBuffer< yarp::rosmsg::sensor_msgs::Temperature >, yarp::os::PortWriterBuffer< yarp::rosmsg::geometry_msgs::WrenchStamped >, yarp::os::PortWriterBuffer< yarp::sig::Vector >, yarp::os::PortWriterBuffer< ImageType >, yarp::os::PortWriterBuffer< yarp::sig::VectorOf >, yarp::os::PortWriterBuffer< yarp::dev::impl::jointData >, yarp::os::PortWriterBuffer< SensorStreamingData >, yarp::os::PortWriterBuffer< yarp::sig::ImageOf< yarp::sig::PixelFloat > >, yarp::os::PortWriterBuffer< yarp::os::Bottle >, yarp::os::PortWriterBuffer< ROS_MSG >, yarp::os::PortWriterBuffer< yarp::os::PortablePair >, yarp::os::PortWriterBuffer< JoyData >, yarp::os::PortWriterBuffer< yarp::rosmsg::visualization_msgs::MarkerArray >, yarp::os::PortWriterBuffer< yarp::rosmsg::tf2_msgs::TFMessage >, yarp::os::PortWriterBuffer< yarp::rosmsg::sensor_msgs::CameraInfo >, yarp::os::PortWriterBuffer< yarp::dev::Nav2D::Map2DLocation >, yarp::os::PortWriterBuffer< yarp::rosmsg::nav_msgs::OccupancyGrid >, yarp::os::PortWriterBuffer< yarp::rosmsg::geometry_msgs::PoseStamped >, yarp::os::PortWriterBuffer< yarp::rosmsg::nav_msgs::Odometry >, yarp::os::PortWriterBuffer< yarp::rosmsg::nav_msgs::MapMetaData >, yarp::os::PortWriterBuffer< yarp::dev::LaserScan2D >, yarp::os::PortWriterBuffer< yarp::sig::FlexImage >, yarp::os::PortWriterBuffer< yarp::rosmsg::sensor_msgs::JointState >, yarp::os::PortWriterBuffer< yarp::dev::OdometryData >, yarp::os::PortWriterBuffer< yarp::rosmsg::sensor_msgs::LaserScan >, yarp::os::PortWriterBuffer< DepthImage >, yarp::os::PortWriterBuffer< yarp::rosmsg::sensor_msgs::Image >, yarp::os::PortWriterBuffer< yarp::rosmsg::sensor_msgs::MagneticField >, yarp::os::PortWriterBuffer< yarp::rosmsg::sensor_msgs::Imu >, and yarp::os::PortWriterBuffer< yarp::sig::Sound >.
| void PortWriterBufferBase::detach | ( | ) |
Definition at line 215 of file PortWriterBufferBase.cpp.
| const void * PortWriterBufferBase::getContent | ( | ) | const |
Definition at line 194 of file PortWriterBufferBase.cpp.
| int PortWriterBufferBase::getCount | ( | ) |
Definition at line 205 of file PortWriterBufferBase.cpp.
| bool PortWriterBufferBase::releaseContent | ( | ) |
Definition at line 199 of file PortWriterBufferBase.cpp.
| void PortWriterBufferBase::waitForWrite | ( | ) |
Definition at line 225 of file PortWriterBufferBase.cpp.
| void PortWriterBufferBase::write | ( | bool | strict | ) |
Definition at line 220 of file PortWriterBufferBase.cpp.