Go to the source code of this file.
|
| class | yarp::dev::IRGBDSensor |
| | A generic interface for cameras that have both color camera as well as depth camera sensor, like kinect device. More...
|
| |
|
| | yarp |
| | The main, catch-all namespace for YARP.
|
| |
| | yarp::dev |
| | An interface for the device drivers.
|
| |
|
| constexpr yarp::conf::vocab32_t | VOCAB_RGBD_SENSOR = yarp::os::createVocab('r','g','d','b') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_RGBD_PROTOCOL_VERSION = yarp::os::createVocab('p','r','o','t') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_EXTRINSIC_PARAM = yarp::os::createVocab('e','x','t') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_ERROR_MSG = yarp::os::createVocab('m','e','s','s') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_RGB_IMAGE = yarp::os::createVocab('i','m','g','r') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_DEPTH_IMAGE = yarp::os::createVocab('i','m','g','d') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_IMAGES = yarp::os::createVocab('i','m','m','s') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_STATUS = yarp::os::createVocab('s','t','a','t') |
| |
◆ VOCAB_DEPTH_IMAGE
◆ VOCAB_ERROR_MSG
◆ VOCAB_EXTRINSIC_PARAM
◆ VOCAB_IMAGES
◆ VOCAB_RGB_IMAGE
◆ VOCAB_RGBD_PROTOCOL_VERSION
◆ VOCAB_RGBD_SENSOR
◆ VOCAB_STATUS



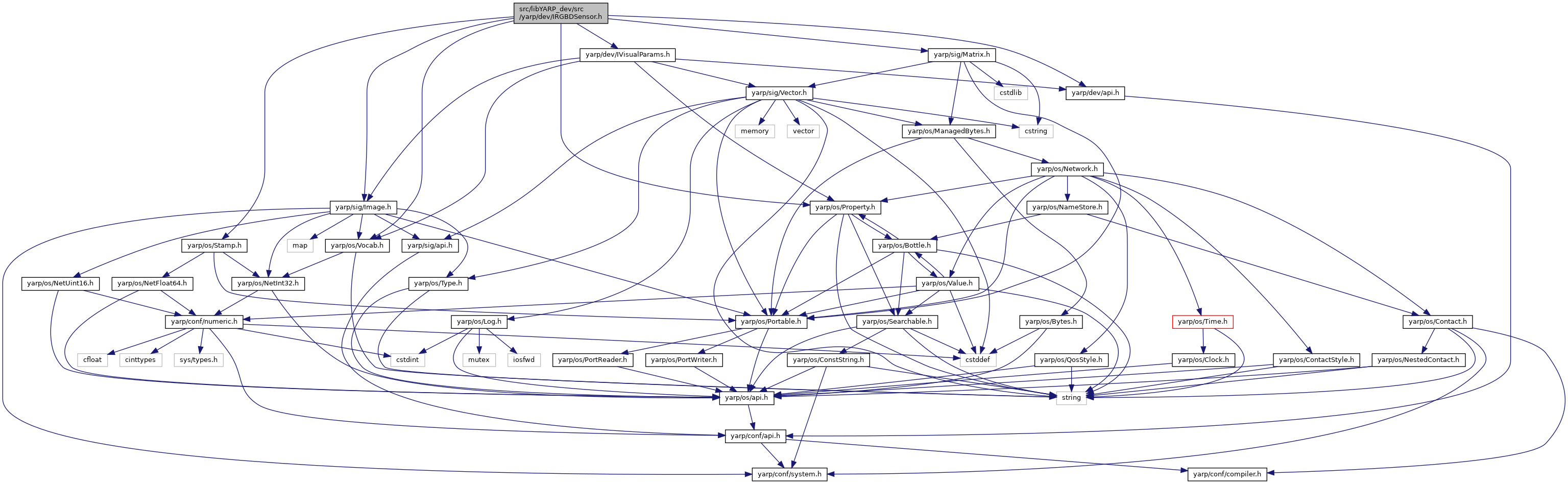
 Include dependency graph for IRGBDSensor.h:
Include dependency graph for IRGBDSensor.h: