#include <yarp/os/Vocab.h>
#include <yarp/dev/api.h>
#include <yarp/sig/Vector.h>
#include <yarp/dev/LaserMeasurementData.h>
#include <vector>
#include <string>
Go to the source code of this file.
|
| | yarp |
| | The main, catch-all namespace for YARP.
|
| |
| | yarp::dev |
| | An interface for the device drivers.
|
| |
|
| constexpr yarp::conf::vocab32_t | VOCAB_ILASER2D = yarp::os::createVocab('i','l','a','s') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_DEVICE_INFO = yarp::os::createVocab('l','s','n','f') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_LASER_DISTANCE_RANGE = yarp::os::createVocab('l','s','d','r') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_LASER_ANGULAR_RANGE = yarp::os::createVocab('l','s','a','r') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_LASER_ANGULAR_STEP = yarp::os::createVocab('l','s','a','s') |
| |
| constexpr yarp::conf::vocab32_t | VOCAB_LASER_SCAN_RATE = yarp::os::createVocab('l','s','s','r') |
| |
◆ VOCAB_DEVICE_INFO
◆ VOCAB_ILASER2D
◆ VOCAB_LASER_ANGULAR_RANGE
◆ VOCAB_LASER_ANGULAR_STEP
◆ VOCAB_LASER_DISTANCE_RANGE
◆ VOCAB_LASER_SCAN_RATE



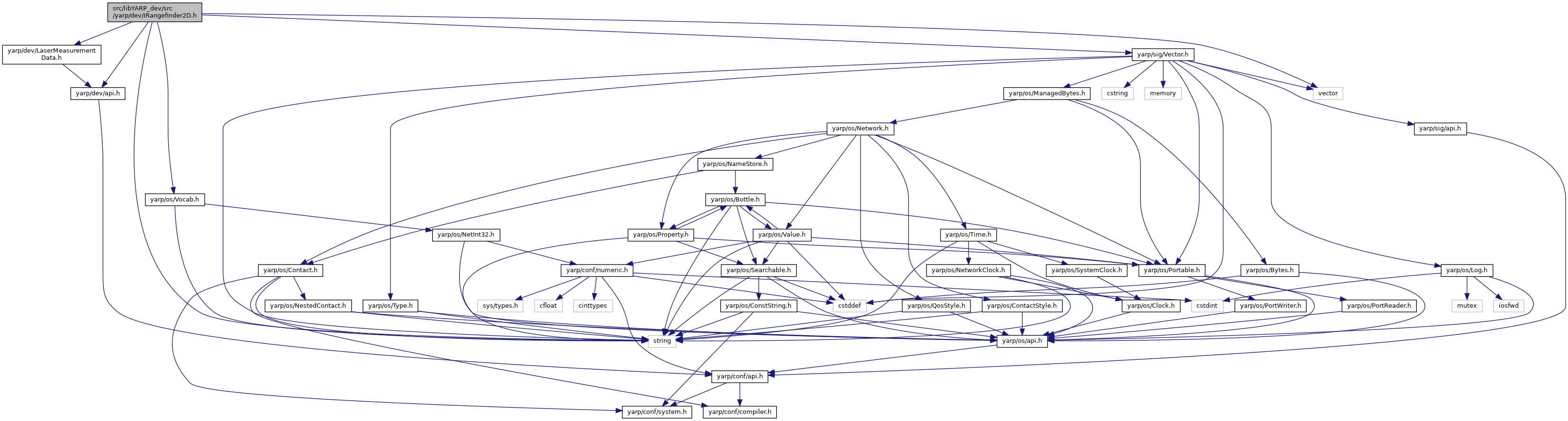
 Include dependency graph for IRangefinder2D.h:
Include dependency graph for IRangefinder2D.h: