|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
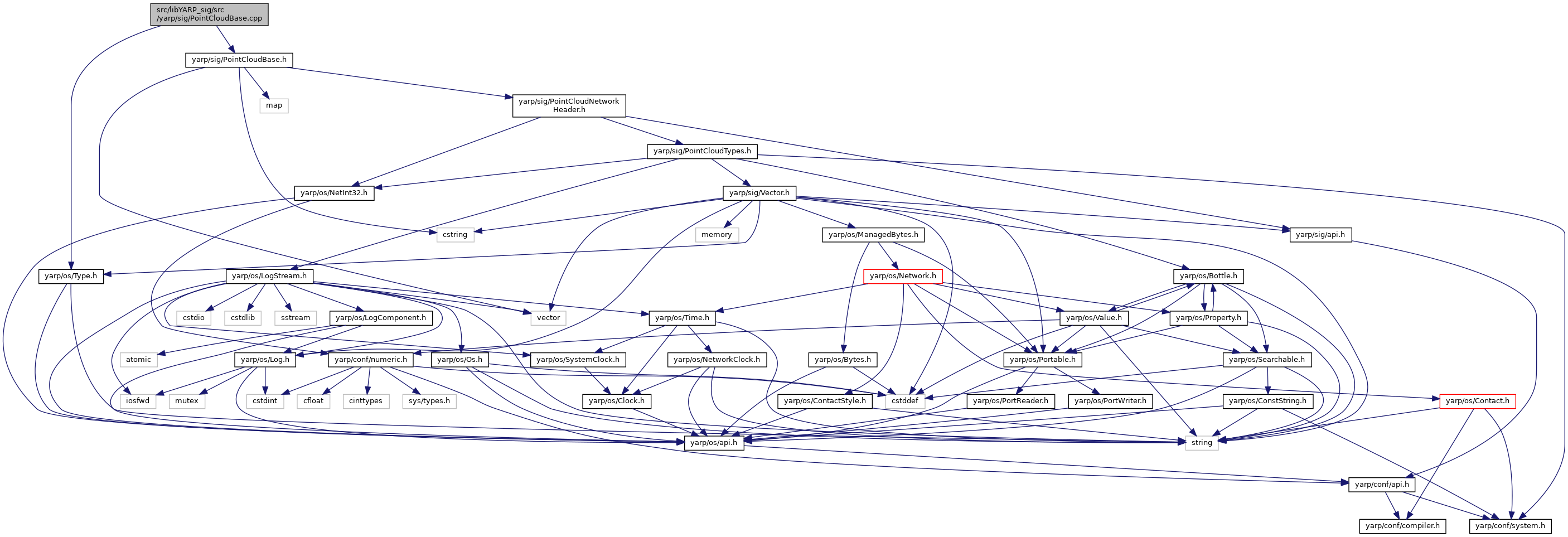
 Include dependency graph for PointCloudBase.cpp:
Include dependency graph for PointCloudBase.cpp:Go to the source code of this file.
Variables | |
| const std::map< std::pair< int, int >, size_t > | offsetMap |
| const std::map< int, std::vector< int > > | compositionMap |
| const std::map< int, size_t > | sizeMap |
| const std::map<int, std::vector<int> > compositionMap |
Definition at line 46 of file PointCloudBase.cpp.
| const std::map<std::pair<int, int>, size_t> offsetMap |
Definition at line 20 of file PointCloudBase.cpp.
| const std::map<int, size_t> sizeMap |
Definition at line 71 of file PointCloudBase.cpp.