|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
group: Lets you make a bunch of devices as a group.
More...
#include <DeviceGroup/DeviceGroup.h>
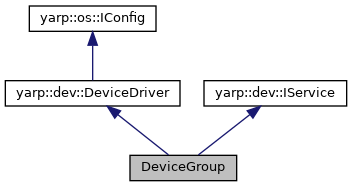
 Inheritance diagram for DeviceGroup:
Inheritance diagram for DeviceGroup:Public Member Functions | |
| DeviceGroup ()=default | |
| DeviceGroup (const DeviceGroup &)=delete | |
| DeviceGroup (DeviceGroup &&)=delete | |
| DeviceGroup & | operator= (const DeviceGroup &)=delete |
| DeviceGroup & | operator= (DeviceGroup &&)=delete |
| ~DeviceGroup () override | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. More... | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| bool | startService () override |
| Initiate the service, whatever it is. More... | |
| bool | stopService () override |
| Shut down the service, whatever it is. More... | |
| bool | updateService () override |
| Give the service the chance to run for a while. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::IService | |
| virtual | ~IService () |
group: Lets you make a bunch of devices as a group.
Definition at line 21 of file DeviceGroup.h.
|
default |
|
delete |
|
delete |
|
override |
Definition at line 207 of file DeviceGroup.cpp.
|
inlineoverridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 35 of file DeviceGroup.h.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. See device invocation examples. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 124 of file DeviceGroup.cpp.
|
delete |
|
delete |
|
overridevirtual |
Initiate the service, whatever it is.
The service should then run by itself, without any further interaction with its creator until stopService() is called.
Reimplemented from yarp::dev::IService.
Definition at line 194 of file DeviceGroup.cpp.
|
inlineoverridevirtual |
Shut down the service, whatever it is.
Reimplemented from yarp::dev::IService.
Definition at line 42 of file DeviceGroup.h.
|
overridevirtual |
Give the service the chance to run for a while.
This is an alternative to calling startService(). It is more appropriate in a single-threaded environment.
Reimplemented from yarp::dev::IService.
Definition at line 200 of file DeviceGroup.cpp.