pipe: Tries to connect the output of one device to the input of another.
More...
#include <DevicePipe/DevicePipe.h>
pipe: Tries to connect the output of one device to the input of another.
Definition at line 22 of file DevicePipe.h.
◆ DevicePipe() [1/3]
| DevicePipe::DevicePipe |
( |
| ) |
|
|
default |
◆ DevicePipe() [2/3]
◆ DevicePipe() [3/3]
◆ ~DevicePipe()
| DevicePipe::~DevicePipe |
( |
| ) |
|
|
overridedefault |
◆ close()
| bool DevicePipe::close |
( |
| ) |
|
|
overridevirtual |
◆ open() [1/2]
◆ open() [2/2]
Open the DeviceDriver.
- Parameters
-
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. See device invocation examples. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
- Returns
- true/false upon success/failure
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 27 of file DevicePipe.cpp.
◆ operator=() [1/2]
◆ operator=() [2/2]
◆ startService()
| bool DevicePipe::startService |
( |
| ) |
|
|
inlineoverridevirtual |
Initiate the service, whatever it is.
The service should then run by itself, without any further interaction with its creator until stopService() is called.
- Returns
- true if the service started and needs no help running. If false is returned, the service expects updateService() to be called repeatedly until that function too returns false. This is useful for devices that don't want to manage their own service threads.
Reimplemented from yarp::dev::IService.
Definition at line 38 of file DevicePipe.h.
◆ stopService()
| bool DevicePipe::stopService |
( |
| ) |
|
|
inlineoverridevirtual |
◆ updateService()
| bool DevicePipe::updateService |
( |
| ) |
|
|
overridevirtual |
Give the service the chance to run for a while.
This is an alternative to calling startService(). It is more appropriate in a single-threaded environment.
- Returns
- true iff the service is willing to run some more. A return value of false means that the service would like to stop.
Reimplemented from yarp::dev::IService.
Definition at line 91 of file DevicePipe.cpp.
◆ sink
◆ source
The documentation for this class was generated from the following files:



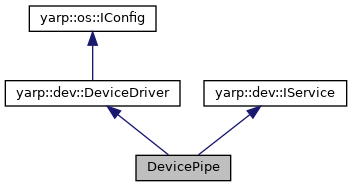
 Inheritance diagram for DevicePipe:
Inheritance diagram for DevicePipe: