|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
robotDescriptionClient: This client device is used to connect to a robotDescriptionServer and ask info about the currently opened devices.
More...
#include <RobotDescriptionClient/RobotDescriptionClient.h>
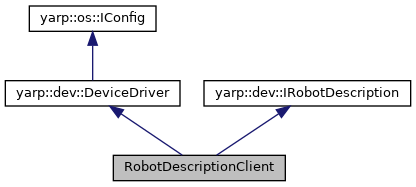
 Inheritance diagram for RobotDescriptionClient:
Inheritance diagram for RobotDescriptionClient:Public Member Functions | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. More... | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| bool | getAllDevices (std::vector< yarp::dev::DeviceDescription > &dev_list) override |
| Ask the complete list of all yarp device drivers registered by a robot description server. More... | |
| bool | getAllDevicesByType (const std::string &type, std::vector< yarp::dev::DeviceDescription > &dev_list) override |
| Ask a list of all registered yarp device drivers whose type corresponds to the given param. More... | |
| bool | registerDevice (const yarp::dev::DeviceDescription &dev) override |
| Register a new running yarp device into a robot description server. More... | |
| bool | unregisterDevice (const std::string &device_name) override |
| Unregister a running yarp device from a robot description server. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::IRobotDescription | |
| virtual | ~IRobotDescription () |
| Destructor. More... | |
Protected Attributes | |
| std::mutex | m_mutex |
| yarp::os::Port | m_rpc_port |
| std::string | m_local_name |
| std::string | m_remote_name |
robotDescriptionClient: This client device is used to connect to a robotDescriptionServer and ask info about the currently opened devices.
Parameters required by this device are:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| local | - | string | - | - | Yes | prefix of the port opened by the device, like /my_module/descriptionClient | MUST start with a '/' character. /rpc is automatically appended. |
| remote | - | string | - | - | Yes | prefix of the port opened by the robotDescriptionServer, like /descriptionServer. | MUST start with a '/' character. /rpc is automatically appended. |
Definition at line 37 of file RobotDescriptionClient.h.
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 74 of file RobotDescriptionClient.cpp.
|
overridevirtual |
Ask the complete list of all yarp device drivers registered by a robot description server.
Implements yarp::dev::IRobotDescription.
Definition at line 173 of file RobotDescriptionClient.cpp.
|
overridevirtual |
Ask a list of all registered yarp device drivers whose type corresponds to the given param.
Implements yarp::dev::IRobotDescription.
Definition at line 81 of file RobotDescriptionClient.cpp.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. See device invocation examples. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 29 of file RobotDescriptionClient.cpp.
|
overridevirtual |
Register a new running yarp device into a robot description server.
Implements yarp::dev::IRobotDescription.
Definition at line 146 of file RobotDescriptionClient.cpp.
|
overridevirtual |
Unregister a running yarp device from a robot description server.
Implements yarp::dev::IRobotDescription.
Definition at line 120 of file RobotDescriptionClient.cpp.
|
protected |
Definition at line 44 of file RobotDescriptionClient.h.
|
protected |
Definition at line 42 of file RobotDescriptionClient.h.
|
protected |
Definition at line 45 of file RobotDescriptionClient.h.
|
protected |
Definition at line 43 of file RobotDescriptionClient.h.