Interface for control devices.
More...
#include <yarp/dev/IControlLimits.h>
|
| virtual | ~IControlLimitsRaw () |
| | Destructor. More...
|
| |
| virtual bool | setLimitsRaw (int axis, double min, double max)=0 |
| | Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More...
|
| |
| virtual bool | getLimitsRaw (int axis, double *min, double *max)=0 |
| | Get the software limits for a particular axis. More...
|
| |
| virtual bool | setVelLimitsRaw (int axis, double min, double max)=0 |
| | Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More...
|
| |
| virtual bool | getVelLimitsRaw (int axis, double *min, double *max)=0 |
| | Get the software speed limits for a particular axis. More...
|
| |
Interface for control devices.
Limits commands.
Definition at line 82 of file IControlLimits.h.
◆ ~IControlLimitsRaw()
| virtual yarp::dev::IControlLimitsRaw::~IControlLimitsRaw |
( |
| ) |
|
|
inlinevirtual |
◆ getLimitsRaw()
| virtual bool yarp::dev::IControlLimitsRaw::getLimitsRaw |
( |
int |
axis, |
|
|
double * |
min, |
|
|
double * |
max |
|
) |
| |
|
pure virtual |
Get the software limits for a particular axis.
- Parameters
-
| axis | joint number |
| pointer | to store the value of the lower limit |
| pointer | to store the value of the upper limit |
- Returns
- true if everything goes fine, false otherwise.
Implemented in yarp::dev::StubImplControlLimitsRaw, and FakeMotionControl.
◆ getVelLimitsRaw()
| virtual bool yarp::dev::IControlLimitsRaw::getVelLimitsRaw |
( |
int |
axis, |
|
|
double * |
min, |
|
|
double * |
max |
|
) |
| |
|
pure virtual |
Get the software speed limits for a particular axis.
- Parameters
-
| axis | joint number |
| min | pointer to store the value of the lower limit |
| max | pointer to store the value of the upper limit |
- Returns
- true if everything goes fine, false otherwise.
Implemented in yarp::dev::StubImplControlLimitsRaw, and FakeMotionControl.
◆ setLimitsRaw()
| virtual bool yarp::dev::IControlLimitsRaw::setLimitsRaw |
( |
int |
axis, |
|
|
double |
min, |
|
|
double |
max |
|
) |
| |
|
pure virtual |
Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation.
- Parameters
-
| axis | joint number (why am I telling you this) |
| min | the value of the lower limit |
| max | the value of the upper limit |
- Returns
- true or false on success or failure
Implemented in yarp::dev::StubImplControlLimitsRaw, and FakeMotionControl.
◆ setVelLimitsRaw()
| virtual bool yarp::dev::IControlLimitsRaw::setVelLimitsRaw |
( |
int |
axis, |
|
|
double |
min, |
|
|
double |
max |
|
) |
| |
|
pure virtual |
Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation.
- Parameters
-
| axis | joint number |
| min | the value of the lower limit |
| max | the value of the upper limit |
- Returns
- true or false on success or failure
Implemented in yarp::dev::StubImplControlLimitsRaw, and FakeMotionControl.
The documentation for this class was generated from the following file:



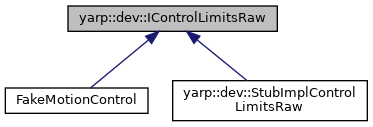
 Inheritance diagram for yarp::dev::IControlLimitsRaw:
Inheritance diagram for yarp::dev::IControlLimitsRaw: