|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
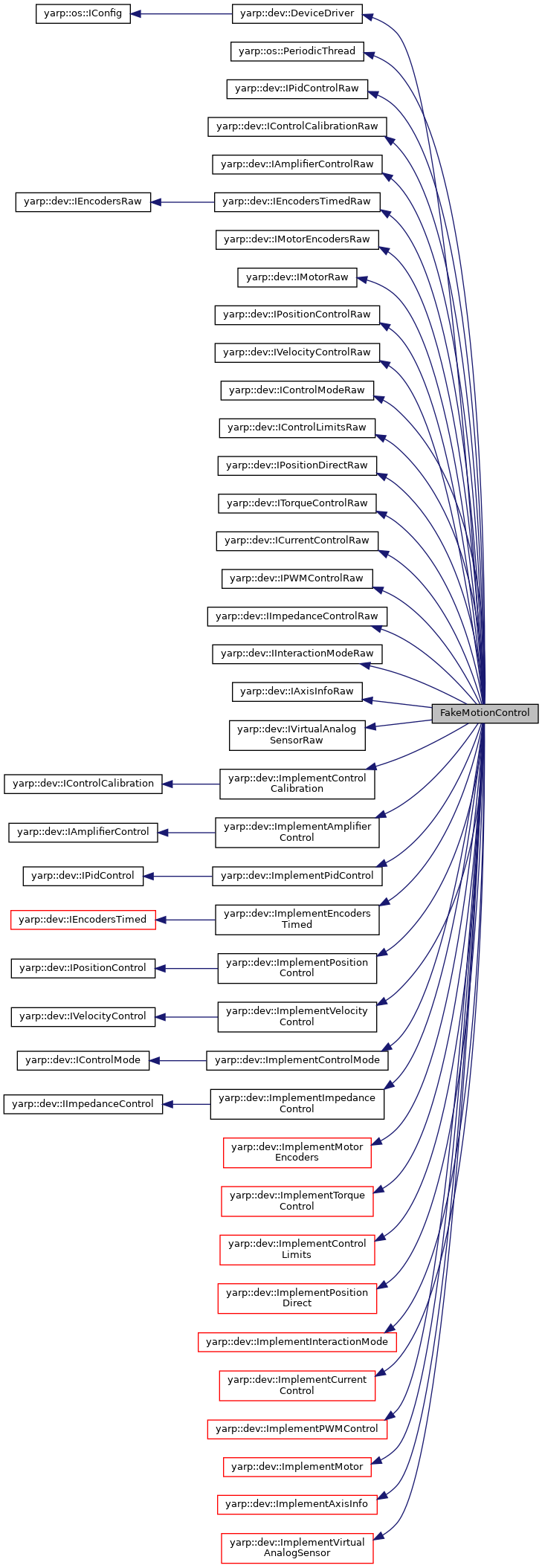
fakeMotionControl: Documentation to be added
More...
#include <fakeMotionControl/fakeMotionControl.h>
 Inheritance diagram for FakeMotionControl:
Inheritance diagram for FakeMotionControl:Public Member Functions | |
| FakeMotionControl () | |
| ~FakeMotionControl () | |
| bool | open (yarp::os::Searchable &par) override |
| Open the DeviceDriver. More... | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| bool | fromConfig (yarp::os::Searchable &config) |
| virtual bool | initialised () |
| bool | alloc (int njoints) |
| Allocated buffers. More... | |
| void | resizeBuffers () |
| Resize previously allocated buffers. More... | |
| bool | threadInit () override |
| Initialization method. More... | |
| void | threadRelease () override |
| Release method. More... | |
| bool | setPidRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, const yarp::dev::Pid &pid) override |
| Set new pid value for a joint axis. More... | |
| bool | setPidsRaw (const yarp::dev::PidControlTypeEnum &pidtype, const yarp::dev::Pid *pids) override |
| Set new pid value on multiple axes. More... | |
| bool | setPidReferenceRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double ref) override |
| Set the controller reference for a given axis. More... | |
| bool | setPidReferencesRaw (const yarp::dev::PidControlTypeEnum &pidtype, const double *refs) override |
| Set the controller reference, multiple axes. More... | |
| bool | setPidErrorLimitRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double limit) override |
| Set the error limit for the controller on a specific joint. More... | |
| bool | setPidErrorLimitsRaw (const yarp::dev::PidControlTypeEnum &pidtype, const double *limits) override |
| Get the error limit for the controller on all joints. More... | |
| bool | getPidErrorRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *err) override |
| Get the current error for a joint. More... | |
| bool | getPidErrorsRaw (const yarp::dev::PidControlTypeEnum &pidtype, double *errs) override |
| Get the error of all joints. More... | |
| bool | getPidOutputRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *out) override |
| Get the output of the controller (e.g. More... | |
| bool | getPidOutputsRaw (const yarp::dev::PidControlTypeEnum &pidtype, double *outs) override |
| Get the output of the controllers (e.g. More... | |
| bool | getPidRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, yarp::dev::Pid *pid) override |
| Get current pid value for a specific joint. More... | |
| bool | getPidsRaw (const yarp::dev::PidControlTypeEnum &pidtype, yarp::dev::Pid *pids) override |
| Get current pid value for a specific joint. More... | |
| bool | getPidReferenceRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *ref) override |
| Get the current reference of the pid controller for a specific joint. More... | |
| bool | getPidReferencesRaw (const yarp::dev::PidControlTypeEnum &pidtype, double *refs) override |
| Get the current reference of all pid controllers. More... | |
| bool | getPidErrorLimitRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *limit) override |
| Get the error limit for the controller on a specific joint. More... | |
| bool | getPidErrorLimitsRaw (const yarp::dev::PidControlTypeEnum &pidtype, double *limits) override |
| Get the error limit for all controllers. More... | |
| bool | resetPidRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| Reset the controller of a given joint, usually sets the current status of the joint as the reference value for the PID, and resets the integrator. More... | |
| bool | disablePidRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| Disable the pid computation for a joint. More... | |
| bool | enablePidRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| Enable the pid computation for a joint. More... | |
| bool | setPidOffsetRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double v) override |
| Set an offset value on the ourput of pid controller. More... | |
| bool | isPidEnabledRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, bool *enabled) override |
| Get the current status (enabled/disabled) of the pid controller. More... | |
| bool | getAxes (int *ax) override |
| Get the number of controlled axes. More... | |
| bool | positionMoveRaw (int j, double ref) override |
| Set new reference point for a single axis. More... | |
| bool | positionMoveRaw (const double *refs) override |
| Set new reference point for all axes. More... | |
| bool | relativeMoveRaw (int j, double delta) override |
| Set relative position. More... | |
| bool | relativeMoveRaw (const double *deltas) override |
| Set relative position, all joints. More... | |
| bool | checkMotionDoneRaw (bool *flag) override |
| Check if the current trajectory is terminated. More... | |
| bool | checkMotionDoneRaw (int j, bool *flag) override |
| Check if the current trajectory is terminated. More... | |
| bool | setRefSpeedRaw (int j, double sp) override |
| Set reference speed for a joint, this is the speed used during the interpolation of the trajectory. More... | |
| bool | setRefSpeedsRaw (const double *spds) override |
| Set reference speed on all joints. More... | |
| bool | setRefAccelerationRaw (int j, double acc) override |
| Set reference acceleration for a joint. More... | |
| bool | setRefAccelerationsRaw (const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | getRefSpeedRaw (int j, double *ref) override |
| Get reference speed for a joint. More... | |
| bool | getRefSpeedsRaw (double *spds) override |
| Get reference speed of all joints. More... | |
| bool | getRefAccelerationRaw (int j, double *acc) override |
| Get reference acceleration for a joint. More... | |
| bool | getRefAccelerationsRaw (double *accs) override |
| Get reference acceleration of all joints. More... | |
| bool | stopRaw (int j) override |
| Stop motion, single joint. More... | |
| bool | stopRaw () override |
| Stop motion, multiple joints. More... | |
| bool | positionMoveRaw (const int n_joint, const int *joints, const double *refs) override |
| Set new reference point for a subset of joints. More... | |
| bool | relativeMoveRaw (const int n_joint, const int *joints, const double *deltas) override |
| Set relative position for a subset of joints. More... | |
| bool | checkMotionDoneRaw (const int n_joint, const int *joints, bool *flags) override |
| Check if the current trajectory is terminated. More... | |
| bool | setRefSpeedsRaw (const int n_joint, const int *joints, const double *spds) override |
| Set reference speed on all joints. More... | |
| bool | setRefAccelerationsRaw (const int n_joint, const int *joints, const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | getRefSpeedsRaw (const int n_joint, const int *joints, double *spds) override |
| Get reference speed of all joints. More... | |
| bool | getRefAccelerationsRaw (const int n_joint, const int *joints, double *accs) override |
| Get reference acceleration for a joint. More... | |
| bool | stopRaw (const int n_joint, const int *joints) override |
| Stop motion for subset of joints. More... | |
| bool | getTargetPositionRaw (const int joint, double *ref) override |
| Get the last position reference for the specified axis. More... | |
| bool | getTargetPositionsRaw (double *refs) override |
| Get the last position reference for all axes. More... | |
| bool | getTargetPositionsRaw (const int n_joint, const int *joints, double *refs) override |
| Get the last position reference for the specified group of axes. More... | |
| bool | velocityMoveRaw (int j, double sp) override |
| Start motion at a given speed, single joint. More... | |
| bool | velocityMoveRaw (const double *sp) override |
| Start motion at a given speed, multiple joints. More... | |
| bool | setCalibrationParametersRaw (int axis, const yarp::dev::CalibrationParameters ¶ms) override |
| Start calibration, this method is very often platform specific. More... | |
| bool | calibrateAxisWithParamsRaw (int axis, unsigned int type, double p1, double p2, double p3) override |
| Start calibration, this method is very often platform specific. More... | |
| bool | calibrationDoneRaw (int j) override |
| Check if the calibration is terminated, on a particular joint. More... | |
| bool | getControlModeRaw (int j, int *v) override |
| bool | getControlModesRaw (int *v) override |
| bool | getControlModesRaw (const int n_joint, const int *joints, int *modes) override |
| bool | setControlModeRaw (const int j, const int mode) override |
| bool | setControlModesRaw (const int n_joint, const int *joints, int *modes) override |
| bool | setControlModesRaw (int *modes) override |
| bool | resetEncoderRaw (int j) override |
| Reset encoder, single joint. More... | |
| bool | resetEncodersRaw () override |
| Reset encoders. More... | |
| bool | setEncoderRaw (int j, double val) override |
| Set the value of the encoder for a given joint. More... | |
| bool | setEncodersRaw (const double *vals) override |
| Set the value of all encoders. More... | |
| bool | getEncoderRaw (int j, double *v) override |
| Read the value of an encoder. More... | |
| bool | getEncodersRaw (double *encs) override |
| Read the position of all axes. More... | |
| bool | getEncoderSpeedRaw (int j, double *sp) override |
| Read the instantaneous speed of an axis. More... | |
| bool | getEncoderSpeedsRaw (double *spds) override |
| Read the instantaneous acceleration of an axis. More... | |
| bool | getEncoderAccelerationRaw (int j, double *spds) override |
| Read the instantaneous acceleration of an axis. More... | |
| bool | getEncoderAccelerationsRaw (double *accs) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getEncodersTimedRaw (double *encs, double *stamps) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getEncoderTimedRaw (int j, double *encs, double *stamp) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getNumberOfMotorEncodersRaw (int *num) override |
| Get the number of available motor encoders. More... | |
| bool | resetMotorEncoderRaw (int m) override |
| Reset motor encoder, single motor. More... | |
| bool | resetMotorEncodersRaw () override |
| Reset motor encoders. More... | |
| bool | setMotorEncoderRaw (int m, const double val) override |
| Set the value of the motor encoder for a given motor. More... | |
| bool | setMotorEncodersRaw (const double *vals) override |
| Set the value of all motor encoders. More... | |
| bool | getMotorEncoderRaw (int m, double *v) override |
| Read the value of a motor encoder. More... | |
| bool | getMotorEncodersRaw (double *encs) override |
| Read the position of all motor encoders. More... | |
| bool | getMotorEncoderSpeedRaw (int m, double *sp) override |
| Read the istantaneous speed of a motor encoder. More... | |
| bool | getMotorEncoderSpeedsRaw (double *spds) override |
| Read the instantaneous speed of all motor encoders. More... | |
| bool | getMotorEncoderAccelerationRaw (int m, double *spds) override |
| Read the instantaneous acceleration of a motor encoder. More... | |
| bool | getMotorEncoderAccelerationsRaw (double *accs) override |
| Read the instantaneous acceleration of all motor encoders. More... | |
| bool | getMotorEncodersTimedRaw (double *encs, double *stamps) override |
| Read the instantaneous position of all motor encoders. More... | |
| bool | getMotorEncoderTimedRaw (int m, double *encs, double *stamp) override |
| Read the instantaneous position of a motor encoder. More... | |
| bool | getMotorEncoderCountsPerRevolutionRaw (int m, double *v) override |
| Gets number of counts per revolution for motor encoder m. More... | |
| bool | setMotorEncoderCountsPerRevolutionRaw (int m, const double cpr) override |
| Sets number of counts per revolution for motor encoder m. More... | |
| bool | getAxisNameRaw (int axis, std::string &name) override |
| bool | getJointTypeRaw (int axis, yarp::dev::JointTypeEnum &type) override |
| bool | getGearboxRatioRaw (int m, double *gearbox) override |
| Get the gearbox ratio for a specific motor. More... | |
| virtual bool | getRotorEncoderResolutionRaw (int m, double &rotres) |
| virtual bool | getJointEncoderResolutionRaw (int m, double &jntres) |
| virtual bool | getJointEncoderTypeRaw (int j, int &type) |
| virtual bool | getRotorEncoderTypeRaw (int j, int &type) |
| virtual bool | getKinematicMJRaw (int j, double &rotres) |
| virtual bool | getHasTempSensorsRaw (int j, int &ret) |
| virtual bool | getHasHallSensorRaw (int j, int &ret) |
| virtual bool | getHasRotorEncoderRaw (int j, int &ret) |
| virtual bool | getHasRotorEncoderIndexRaw (int j, int &ret) |
| virtual bool | getMotorPolesRaw (int j, int &poles) |
| virtual bool | getRotorIndexOffsetRaw (int j, double &rotorOffset) |
| virtual bool | getTorqueControlFilterType (int j, int &type) |
| bool | enableAmpRaw (int j) override |
| Enable the amplifier on a specific joint. More... | |
| bool | disableAmpRaw (int j) override |
| Disable the amplifier on a specific joint. More... | |
| bool | getCurrentsRaw (double *vals) override |
| bool | getCurrentRaw (int j, double *val) override |
| bool | getNominalCurrentRaw (int m, double *val) override |
| bool | setNominalCurrentRaw (int m, const double val) override |
| bool | setMaxCurrentRaw (int j, double val) override |
| bool | getMaxCurrentRaw (int j, double *val) override |
| Returns the maximum electric current allowed for a given motor. More... | |
| bool | getPeakCurrentRaw (int m, double *val) override |
| bool | setPeakCurrentRaw (int m, const double val) override |
| bool | getAmpStatusRaw (int *st) override |
| bool | getAmpStatusRaw (int j, int *st) override |
| bool | getPWMRaw (int j, double *val) override |
| bool | getPWMLimitRaw (int j, double *val) override |
| bool | setPWMLimitRaw (int j, const double val) override |
| bool | getPowerSupplyVoltageRaw (int j, double *val) override |
| bool | setLimitsRaw (int axis, double min, double max) override |
| Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More... | |
| bool | getLimitsRaw (int axis, double *min, double *max) override |
| Get the software limits for a particular axis. More... | |
| bool | setVelLimitsRaw (int axis, double min, double max) override |
| Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More... | |
| bool | getVelLimitsRaw (int axis, double *min, double *max) override |
| Get the software speed limits for a particular axis. More... | |
| bool | getTorqueRaw (int j, double *t) override |
| Get the value of the torque on a given joint (this is the feedback if you have a torque sensor). More... | |
| bool | getTorquesRaw (double *t) override |
| Get the value of the torque for all joints (this is the feedback if you have torque sensors). More... | |
| bool | getTorqueRangeRaw (int j, double *min, double *max) override |
| Get the full scale of the torque sensor of a given joint. More... | |
| bool | getTorqueRangesRaw (double *min, double *max) override |
| Get the full scale of the torque sensors of all joints. More... | |
| bool | setRefTorquesRaw (const double *t) override |
| Set the reference value of the torque for all joints. More... | |
| bool | setRefTorqueRaw (int j, double t) override |
| Set the reference value of the torque for a given joint. More... | |
| bool | setRefTorquesRaw (const int n_joint, const int *joints, const double *t) override |
| Set new torque reference for a subset of joints. More... | |
| bool | getRefTorquesRaw (double *t) override |
| Get the reference value of the torque for all joints. More... | |
| bool | getRefTorqueRaw (int j, double *t) override |
| Set the reference value of the torque for a given joint. More... | |
| bool | getMotorTorqueParamsRaw (int j, yarp::dev::MotorTorqueParameters *params) override |
| Get the motor parameters. More... | |
| bool | setMotorTorqueParamsRaw (int j, const yarp::dev::MotorTorqueParameters params) override |
| Set the motor parameters. More... | |
| bool | velocityMoveRaw (const int n_joint, const int *joints, const double *spds) override |
| Start motion at a given speed for a subset of joints. More... | |
| bool | getRefVelocityRaw (const int joint, double *ref) override |
| Get the last reference speed set by velocityMove for single joint. More... | |
| bool | getRefVelocitiesRaw (double *refs) override |
| Get the last reference speed set by velocityMove for all joints. More... | |
| bool | getRefVelocitiesRaw (const int n_joint, const int *joints, double *refs) override |
| Get the last reference speed set by velocityMove for a group of joints. More... | |
| bool | getImpedanceRaw (int j, double *stiffness, double *damping) override |
| Get current impedance parameters (stiffness,damping,offset) for a specific joint. More... | |
| bool | setImpedanceRaw (int j, double stiffness, double damping) override |
| Set current impedance parameters (stiffness,damping) for a specific joint. More... | |
| bool | setImpedanceOffsetRaw (int j, double offset) override |
| Set current force Offset for a specific joint. More... | |
| bool | getImpedanceOffsetRaw (int j, double *offset) override |
| Get current force Offset for a specific joint. More... | |
| bool | getCurrentImpedanceLimitRaw (int j, double *min_stiff, double *max_stiff, double *min_damp, double *max_damp) override |
| Get the current impedandance limits for a specific joint. More... | |
| bool | setPositionRaw (int j, double ref) override |
| Set new position for a single axis. More... | |
| bool | setPositionsRaw (const int n_joint, const int *joints, const double *refs) override |
| Set new reference point for all axes. More... | |
| bool | setPositionsRaw (const double *refs) override |
| Set new position for a set of axes. More... | |
| bool | getRefPositionRaw (const int joint, double *ref) override |
| Get the last position reference for the specified axis. More... | |
| bool | getRefPositionsRaw (double *refs) override |
| Get the last position reference for all axes. More... | |
| bool | getRefPositionsRaw (const int n_joint, const int *joints, double *refs) override |
| Get the last position reference for the specified group of axes. More... | |
| bool | getInteractionModeRaw (int j, yarp::dev::InteractionModeEnum *_mode) override |
| Get the current interaction mode of the robot, values can be stiff or compliant. More... | |
| bool | getInteractionModesRaw (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| Get the current interaction mode of the robot for a set of joints, values can be stiff or compliant. More... | |
| bool | getInteractionModesRaw (yarp::dev::InteractionModeEnum *modes) override |
| Get the current interaction mode of the robot for a all the joints, values can be stiff or compliant. More... | |
| bool | setInteractionModeRaw (int j, yarp::dev::InteractionModeEnum _mode) override |
| Set the interaction mode of the robot, values can be stiff or compliant. More... | |
| bool | setInteractionModesRaw (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| Set the interaction mode of the robot for a set of joints, values can be stiff or compliant. More... | |
| bool | setInteractionModesRaw (yarp::dev::InteractionModeEnum *modes) override |
| Set the interaction mode of the robot for a all the joints, values can be stiff or compliant. More... | |
| bool | getNumberOfMotorsRaw (int *num) override |
| Retrieves the number of controlled motors from the current physical interface. More... | |
| bool | getTemperatureRaw (int m, double *val) override |
| Get temperature of a motor. More... | |
| bool | getTemperaturesRaw (double *vals) override |
| Get temperature of all the motors. More... | |
| bool | getTemperatureLimitRaw (int m, double *temp) override |
| Retreives the current temperature limit for a specific motor. More... | |
| bool | setTemperatureLimitRaw (int m, const double temp) override |
| Set the temperature limit for a specific motor. More... | |
| bool | setRefDutyCycleRaw (int j, double v) override |
| Sets the reference dutycycle of a single motor. More... | |
| bool | setRefDutyCyclesRaw (const double *v) override |
| Sets the reference dutycycle for all motors. More... | |
| bool | getRefDutyCycleRaw (int j, double *v) override |
| Gets the last reference sent using the setRefDutyCycleRaw function. More... | |
| bool | getRefDutyCyclesRaw (double *v) override |
| Gets the last reference sent using the setRefDutyCyclesRaw function. More... | |
| bool | getDutyCycleRaw (int j, double *v) override |
| Gets the current dutycycle of the output of the amplifier (i.e. More... | |
| bool | getDutyCyclesRaw (double *v) override |
| Gets the current dutycycle of the output of the amplifier (i.e. More... | |
| bool | getCurrentRangeRaw (int j, double *min, double *max) override |
| Get the full scale of the current measurement for a given motor (e.g. More... | |
| bool | getCurrentRangesRaw (double *min, double *max) override |
| Get the full scale of the current measurements for all motors motor (e.g. More... | |
| bool | setRefCurrentsRaw (const double *t) override |
| Set the reference value of the currents for all motors. More... | |
| bool | setRefCurrentRaw (int j, double t) override |
| Set the reference value of the current for a single motor. More... | |
| bool | setRefCurrentsRaw (const int n_joint, const int *joints, const double *t) override |
| Set the reference value of the current for a group of motors. More... | |
| bool | getRefCurrentsRaw (double *t) override |
| Get the reference value of the currents for all motors. More... | |
| bool | getRefCurrentRaw (int j, double *t) override |
| Get the reference value of the current for a single motor. More... | |
| yarp::dev::VAS_status | getVirtualAnalogSensorStatusRaw (int ch) override |
| Check the status of a given channel. More... | |
| int | getVirtualAnalogSensorChannelsRaw () override |
| Get the number of channels of the virtual sensor. More... | |
| bool | updateVirtualAnalogSensorMeasureRaw (yarp::sig::Vector &measure) override |
| Set a vector of torque values for virtual sensor. More... | |
| bool | updateVirtualAnalogSensorMeasureRaw (int ch, double &measure) override |
| void | run () override |
| Loop function. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::os::PeriodicThread | |
| PeriodicThread (double period, ShouldUseSystemClock useSystemClock=ShouldUseSystemClock::No) | |
| Constructor. More... | |
| virtual | ~PeriodicThread () |
| bool | start () |
| Call this to start the thread. More... | |
| void | step () |
| Call this to "step" the thread rather than starting it. More... | |
| void | stop () |
| Call this to stop the thread, this call blocks until the thread is terminated (and releaseThread() called). More... | |
| void | askToStop () |
| Stop the thread. More... | |
| bool | isRunning () const |
| Returns true when the thread is started, false otherwise. More... | |
| bool | isSuspended () const |
| Returns true when the thread is suspended, false otherwise. More... | |
| bool | setPeriod (double period) |
| Set the (new) period of the thread. More... | |
| double | getPeriod () const |
| Return the current period of the thread. More... | |
| void | suspend () |
| Suspend the thread, the thread keeps running by doLoop is never executed. More... | |
| void | resume () |
| Resume the thread if previously suspended. More... | |
| void | resetStat () |
| Reset thread statistics. More... | |
| double | getEstimatedPeriod () const |
| Return estimated period since last reset. More... | |
| void | getEstimatedPeriod (double &av, double &std) const |
| Return estimated period since last reset. More... | |
| unsigned int | getIterations () const |
| Return the number of iterations performed since last reset. More... | |
| double | getEstimatedUsed () const |
| Return the estimated duration of the run() function since last reset. More... | |
| void | getEstimatedUsed (double &av, double &std) const |
| Return estimated duration of the run() function since last reset. More... | |
| int | setPriority (int priority, int policy=-1) |
| Set the priority and scheduling policy of the thread, if the OS supports that. More... | |
| int | getPriority () const |
| Query the current priority of the thread, if the OS supports that. More... | |
| int | getPolicy () const |
| Query the current scheduling policy of the thread, if the OS supports that. More... | |
| Public Member Functions inherited from yarp::dev::IPidControlRaw | |
| virtual | ~IPidControlRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IControlCalibrationRaw | |
| IControlCalibrationRaw () | |
| virtual | ~IControlCalibrationRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IAmplifierControlRaw | |
| virtual | ~IAmplifierControlRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IEncodersTimedRaw | |
| virtual | ~IEncodersTimedRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IEncodersRaw | |
| virtual | ~IEncodersRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IMotorEncodersRaw | |
| virtual | ~IMotorEncodersRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IMotorRaw | |
| virtual | ~IMotorRaw () |
| Destructor. More... | |
| virtual bool | setGearboxRatioRaw (int m, const double val) |
| Set the gearbox ratio for a specific motor. More... | |
| Public Member Functions inherited from yarp::dev::IPositionControlRaw | |
| virtual | ~IPositionControlRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IVelocityControlRaw | |
| virtual | ~IVelocityControlRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IControlModeRaw | |
| virtual | ~IControlModeRaw () |
| Public Member Functions inherited from yarp::dev::IControlLimitsRaw | |
| virtual | ~IControlLimitsRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IPositionDirectRaw | |
| virtual | ~IPositionDirectRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ITorqueControlRaw | |
| virtual | ~ITorqueControlRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ICurrentControlRaw | |
| virtual | ~ICurrentControlRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IPWMControlRaw | |
| virtual | ~IPWMControlRaw () |
| Public Member Functions inherited from yarp::dev::IImpedanceControlRaw | |
| virtual | ~IImpedanceControlRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IInteractionModeRaw | |
| virtual | ~IInteractionModeRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IAxisInfoRaw | |
| virtual | ~IAxisInfoRaw () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IVirtualAnalogSensorRaw | |
| virtual | ~IVirtualAnalogSensorRaw () |
| Public Member Functions inherited from yarp::dev::ImplementControlCalibration | |
| ImplementControlCalibration (yarp::dev::IControlCalibrationRaw *y) | |
| virtual | ~ImplementControlCalibration () |
| Destructor. More... | |
| bool | calibrateAxisWithParams (int axis, unsigned int type, double p1, double p2, double p3) override |
| Start calibration, this method is very often platform specific. More... | |
| bool | setCalibrationParameters (int axis, const CalibrationParameters ¶ms) override |
| Start calibration, this method is very often platform specific. More... | |
| bool | calibrationDone (int j) override |
| Check if the calibration is terminated, on a particular joint. More... | |
| Public Member Functions inherited from yarp::dev::IControlCalibration | |
| IControlCalibration () | |
| virtual | ~IControlCalibration () |
| Destructor. More... | |
| virtual bool | setCalibrator (ICalibrator *c) |
| Set the calibrator object to be used to calibrate the robot. More... | |
| virtual bool | calibrateRobot () |
| Calibrate robot by using an external calibrator. More... | |
| virtual bool | park (bool wait=true) |
| virtual bool | abortCalibration () |
| virtual bool | abortPark () |
| Public Member Functions inherited from yarp::dev::ImplementAmplifierControl | |
| ImplementAmplifierControl (yarp::dev::IAmplifierControlRaw *y) | |
| virtual | ~ImplementAmplifierControl () |
| Destructor. More... | |
| bool | enableAmp (int j) override |
| Enable the amplifier on a specific joint. More... | |
| bool | disableAmp (int j) override |
| Disable the amplifier on a specific joint. More... | |
| bool | getAmpStatus (int *st) override |
| bool | getAmpStatus (int j, int *st) override |
| bool | getCurrents (double *vals) override |
| bool | getCurrent (int j, double *val) override |
| bool | setMaxCurrent (int j, double v) override |
| bool | getMaxCurrent (int j, double *v) override |
| Returns the maximum electric current allowed for a given motor. More... | |
| bool | getNominalCurrent (int m, double *val) override |
| bool | setNominalCurrent (int m, const double val) override |
| bool | getPeakCurrent (int m, double *val) override |
| bool | setPeakCurrent (int m, const double val) override |
| bool | getPWM (int j, double *val) override |
| bool | getPWMLimit (int j, double *val) override |
| bool | setPWMLimit (int j, const double val) override |
| bool | getPowerSupplyVoltage (int j, double *val) override |
| Public Member Functions inherited from yarp::dev::IAmplifierControl | |
| virtual | ~IAmplifierControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementPidControl | |
| ImplementPidControl (yarp::dev::IPidControlRaw *y) | |
| virtual | ~ImplementPidControl () |
| bool | setPid (const PidControlTypeEnum &pidtype, int j, const Pid &pid) override |
| Set new pid value for a joint axis. More... | |
| bool | setPids (const PidControlTypeEnum &pidtype, const Pid *pids) override |
| Set new pid value on multiple axes. More... | |
| bool | setPidReference (const PidControlTypeEnum &pidtype, int j, double ref) override |
| Set the controller reference for a given axis. More... | |
| bool | setPidReferences (const PidControlTypeEnum &pidtype, const double *refs) override |
| Set the controller reference, multiple axes. More... | |
| bool | setPidErrorLimit (const PidControlTypeEnum &pidtype, int j, double limit) override |
| Set the error limit for the controller on a specifi joint. More... | |
| bool | setPidErrorLimits (const PidControlTypeEnum &pidtype, const double *limits) override |
| Get the error limit for the controller on all joints. More... | |
| bool | getPidError (const PidControlTypeEnum &pidtype, int j, double *err) override |
| Get the current error for a joint. More... | |
| bool | getPidErrors (const PidControlTypeEnum &pidtype, double *errs) override |
| Get the error of all joints. More... | |
| bool | getPidOutput (const PidControlTypeEnum &pidtype, int j, double *out) override |
| Get the output of the controller (e.g. More... | |
| bool | getPidOutputs (const PidControlTypeEnum &pidtype, double *outs) override |
| Get the output of the controllers (e.g. More... | |
| bool | getPid (const PidControlTypeEnum &pidtype, int j, Pid *pid) override |
| Get current pid value for a specific joint. More... | |
| bool | getPids (const PidControlTypeEnum &pidtype, Pid *pids) override |
| Get current pid value for a specific joint. More... | |
| bool | getPidReference (const PidControlTypeEnum &pidtype, int j, double *ref) override |
| Get the current reference of the pid controller for a specific joint. More... | |
| bool | getPidReferences (const PidControlTypeEnum &pidtype, double *refs) override |
| Get the current reference of all pid controllers. More... | |
| bool | getPidErrorLimit (const PidControlTypeEnum &pidtype, int j, double *ref) override |
| Get the error limit for the controller on a specific joint. More... | |
| bool | getPidErrorLimits (const PidControlTypeEnum &pidtype, double *refs) override |
| Get the error limit for all controllers. More... | |
| bool | resetPid (const PidControlTypeEnum &pidtype, int j) override |
| Reset the controller of a given joint, usually sets the current status of the joint as the reference value for the PID, and resets the integrator. More... | |
| bool | enablePid (const PidControlTypeEnum &pidtype, int j) override |
| Enable the pid computation for a joint. More... | |
| bool | disablePid (const PidControlTypeEnum &pidtype, int j) override |
| Disable the pid computation for a joint. More... | |
| bool | setPidOffset (const PidControlTypeEnum &pidtype, int j, double v) override |
| Set offset value for a given controller. More... | |
| bool | isPidEnabled (const PidControlTypeEnum &pidtype, int j, bool *enabled) override |
| Get the current status (enabled/disabled) of the pid. More... | |
| void | b () |
| Public Member Functions inherited from yarp::dev::IPidControl | |
| virtual | ~IPidControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementEncodersTimed | |
| ImplementEncodersTimed (yarp::dev::IEncodersTimedRaw *y) | |
| virtual | ~ImplementEncodersTimed () |
| bool | resetEncoder (int j) override |
| Reset encoder, single joint. More... | |
| bool | resetEncoders () override |
| Reset encoders. More... | |
| bool | setEncoder (int j, double val) override |
| Set the value of the encoder for a given joint. More... | |
| bool | setEncoders (const double *vals) override |
| Set the value of all encoders. More... | |
| bool | getEncoder (int j, double *v) override |
| Read the value of an encoder. More... | |
| bool | getEncodersTimed (double *encs, double *time) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getEncoderTimed (int j, double *v, double *t) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getEncoders (double *encs) override |
| Read the position of all axes. More... | |
| bool | getEncoderSpeed (int j, double *spds) override |
| Read the istantaneous speed of an axis. More... | |
| bool | getEncoderSpeeds (double *spds) override |
| Read the instantaneous speed of all axes. More... | |
| bool | getEncoderAcceleration (int j, double *spds) override |
| Read the instantaneous acceleration of an axis. More... | |
| bool | getEncoderAccelerations (double *accs) override |
| Read the instantaneous acceleration of all axes. More... | |
| Public Member Functions inherited from yarp::dev::IEncodersTimed | |
| virtual | ~IEncodersTimed () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IEncoders | |
| virtual | ~IEncoders () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementPositionControl | |
| ImplementPositionControl (yarp::dev::IPositionControlRaw *y) | |
| Constructor. More... | |
| virtual | ~ImplementPositionControl () |
| Destructor. More... | |
| bool | positionMove (int j, double ref) override |
| Set new reference point for a single axis. More... | |
| bool | positionMove (const int n_joint, const int *joints, const double *refs) override |
| Set new reference point for a subset of joints. More... | |
| bool | positionMove (const double *refs) override |
| Set new reference point for all axes. More... | |
| bool | relativeMove (int j, double delta) override |
| Set relative position. More... | |
| bool | relativeMove (const int n_joint, const int *joints, const double *deltas) override |
| Set relative position for a subset of joints. More... | |
| bool | relativeMove (const double *deltas) override |
| Set relative position, all joints. More... | |
| bool | checkMotionDone (bool *flag) override |
| Check if the current trajectory is terminated. More... | |
| bool | checkMotionDone (const int n_joint, const int *joints, bool *flags) override |
| Check if the current trajectory is terminated. More... | |
| bool | checkMotionDone (int j, bool *flag) override |
| Check if the current trajectory is terminated. More... | |
| bool | setRefSpeed (int j, double sp) override |
| Set reference speed for a joint, this is the speed used during the interpolation of the trajectory. More... | |
| bool | setRefSpeeds (const int n_joint, const int *joints, const double *spds) override |
| Set reference speed on all joints. More... | |
| bool | setRefSpeeds (const double *spds) override |
| Set reference speed on all joints. More... | |
| bool | setRefAcceleration (int j, double acc) override |
| Set reference acceleration for a joint. More... | |
| bool | setRefAccelerations (const int n_joint, const int *joints, const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | setRefAccelerations (const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | getRefSpeed (int j, double *ref) override |
| Get reference speed for a joint. More... | |
| bool | getRefSpeeds (const int n_joint, const int *joints, double *spds) override |
| Get reference speed of all joints. More... | |
| bool | getRefSpeeds (double *spds) override |
| Get reference speed of all joints. More... | |
| bool | getRefAcceleration (int j, double *acc) override |
| Get reference acceleration for a joint. More... | |
| bool | getRefAccelerations (const int n_joint, const int *joints, double *accs) override |
| Get reference acceleration for a joint. More... | |
| bool | getRefAccelerations (double *accs) override |
| Get reference acceleration of all joints. More... | |
| bool | stop (int j) override |
| Stop motion, single joint. More... | |
| bool | stop (const int n_joint, const int *joints) override |
| Stop motion for subset of joints. More... | |
| bool | stop () override |
| Stop motion, multiple joints. More... | |
| bool | getTargetPosition (const int joint, double *ref) override |
| Get the last position reference for the specified axis. More... | |
| bool | getTargetPositions (double *refs) override |
| Get the last position reference for all axes. More... | |
| bool | getTargetPositions (const int n_joint, const int *joints, double *refs) override |
| Get the last position reference for the specified group of axes. More... | |
| Public Member Functions inherited from yarp::dev::IPositionControl | |
| virtual | ~IPositionControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementVelocityControl | |
| ImplementVelocityControl (yarp::dev::IVelocityControlRaw *y) | |
| Constructor. More... | |
| virtual | ~ImplementVelocityControl () |
| Destructor. More... | |
| bool | velocityMove (int j, double sp) override |
| Start motion at a given speed, single joint. More... | |
| bool | velocityMove (const double *sp) override |
| Start motion at a given speed, multiple joints. More... | |
| bool | setRefAcceleration (int j, double acc) override |
| Set reference acceleration for a joint. More... | |
| bool | setRefAccelerations (const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | getRefAcceleration (int j, double *acc) override |
| Get reference acceleration for a joint. More... | |
| bool | getRefAccelerations (double *accs) override |
| Get reference acceleration of all joints. More... | |
| bool | stop (int j) override |
| Stop motion, single joint. More... | |
| bool | stop () override |
| Stop motion, multiple joints. More... | |
| bool | velocityMove (const int n_joint, const int *joints, const double *spds) override |
| Start motion at a given speed for a subset of joints. More... | |
| bool | getRefVelocity (const int joint, double *vel) override |
| Get the last reference speed set by velocityMove for single joint. More... | |
| bool | getRefVelocities (double *vels) override |
| Get the last reference speed set by velocityMove for all joints. More... | |
| bool | getRefVelocities (const int n_joint, const int *joints, double *vels) override |
| Get the last reference speed set by velocityMove for a group of joints. More... | |
| bool | setRefAccelerations (const int n_joint, const int *joints, const double *accs) override |
| Set reference acceleration for a subset of joints. More... | |
| bool | getRefAccelerations (const int n_joint, const int *joints, double *accs) override |
| Get reference acceleration for a subset of joints. More... | |
| bool | stop (const int n_joint, const int *joints) override |
| Stop motion for a subset of joints. More... | |
| Public Member Functions inherited from yarp::dev::IVelocityControl | |
| virtual | ~IVelocityControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementControlMode | |
| bool | initialize (int k, const int *amap) |
| bool | uninitialize () |
| ImplementControlMode (IControlModeRaw *v) | |
| ~ImplementControlMode () | |
| bool | getControlMode (int j, int *f) override |
| Get the current control mode. More... | |
| bool | getControlModes (int *modes) override |
| Get the current control mode (multiple joints). More... | |
| bool | getControlModes (const int n_joint, const int *joints, int *modes) override |
| Get the current control mode for a subset of axes. More... | |
| bool | setControlMode (const int j, const int mode) override |
| Set the current control mode. More... | |
| bool | setControlModes (const int n_joint, const int *joints, int *modes) override |
| Set the current control mode for a subset of axes. More... | |
| bool | setControlModes (int *modes) override |
| Set the current control mode (multiple joints). More... | |
| Public Member Functions inherited from yarp::dev::IControlMode | |
| virtual | ~IControlMode () |
| Public Member Functions inherited from yarp::dev::ImplementImpedanceControl | |
| ImplementImpedanceControl (yarp::dev::IImpedanceControlRaw *y) | |
| virtual | ~ImplementImpedanceControl () |
| Destructor. More... | |
| bool | getImpedance (int j, double *stiffness, double *damping) override |
| Get current impedance gains (stiffness,damping,offset) for a specific joint. More... | |
| bool | setImpedance (int j, double stiffness, double damping) override |
| Set current impedance gains (stiffness,damping) for a specific joint. More... | |
| bool | setImpedanceOffset (int j, double offset) override |
| Set current force Offset for a specific joint. More... | |
| bool | getImpedanceOffset (int j, double *offset) override |
| Get current force Offset for a specific joint. More... | |
| bool | getCurrentImpedanceLimit (int j, double *min_stiff, double *max_stiff, double *min_damp, double *max_damp) override |
| Get the current impedandance limits for a specific joint. More... | |
| Public Member Functions inherited from yarp::dev::IImpedanceControl | |
| virtual | ~IImpedanceControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementMotorEncoders | |
| ImplementMotorEncoders (yarp::dev::IMotorEncodersRaw *y) | |
| virtual | ~ImplementMotorEncoders () |
| bool | getNumberOfMotorEncoders (int *num) override |
| Get the number of available motor encoders. More... | |
| bool | resetMotorEncoder (int m) override |
| Reset motor encoder, single motor. More... | |
| bool | resetMotorEncoders () override |
| Reset motor encoders. More... | |
| bool | setMotorEncoder (int m, const double val) override |
| Set the value of the motor encoder for a given motor. More... | |
| bool | setMotorEncoders (const double *vals) override |
| Set the value of all motor encoders. More... | |
| bool | setMotorEncoderCountsPerRevolution (int m, const double cpr) override |
| Sets number of counts per revolution for motor encoder m. More... | |
| bool | getMotorEncoderCountsPerRevolution (int m, double *cpr) override |
| Gets number of counts per revolution for motor encoder m. More... | |
| bool | getMotorEncoder (int m, double *v) override |
| Read the value of a motor encoder. More... | |
| bool | getMotorEncodersTimed (double *encs, double *time) override |
| Read the instantaneous position of all motor encoders. More... | |
| bool | getMotorEncoderTimed (int m, double *v, double *t) override |
| Read the instantaneous position of a motor encoder. More... | |
| bool | getMotorEncoders (double *encs) override |
| Read the position of all motor encoders. More... | |
| bool | getMotorEncoderSpeed (int m, double *spds) override |
| Read the istantaneous speed of a motor encoder. More... | |
| bool | getMotorEncoderSpeeds (double *spds) override |
| Read the instantaneous speed of all motor encoders. More... | |
| bool | getMotorEncoderAcceleration (int m, double *spds) override |
| Read the instantaneous acceleration of a motor encoder. More... | |
| bool | getMotorEncoderAccelerations (double *accs) override |
| Read the instantaneous acceleration of all motor encoders. More... | |
| Public Member Functions inherited from yarp::dev::IMotorEncoders | |
| virtual | ~IMotorEncoders () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementTorqueControl | |
| ImplementTorqueControl (yarp::dev::ITorqueControlRaw *y) | |
| virtual | ~ImplementTorqueControl () |
| Destructor. More... | |
| bool | getRefTorque (int j, double *) override |
| Get the reference value of the torque for a given joint. More... | |
| bool | getRefTorques (double *t) override |
| Get the reference value of the torque for all joints. More... | |
| bool | setRefTorques (const double *t) override |
| Set the reference value of the torque for all joints. More... | |
| bool | setRefTorque (int j, double t) override |
| Set the reference value of the torque for a given joint. More... | |
| bool | setRefTorques (const int n_joint, const int *joints, const double *t) override |
| Set new torque reference for a subset of joints. More... | |
| bool | getTorques (double *t) override |
| Get the value of the torque for all joints (this is the feedback if you have torque sensors). More... | |
| bool | getTorque (int j, double *t) override |
| Get the value of the torque on a given joint (this is the feedback if you have a torque sensor). More... | |
| bool | setMotorTorqueParams (int j, const yarp::dev::MotorTorqueParameters params) override |
| Set a subset of motor parameters (bemf, ktau etc) useful for torque control. More... | |
| bool | getMotorTorqueParams (int j, yarp::dev::MotorTorqueParameters *params) override |
| Get a subset of motor parameters (bemf, ktau etc) useful for torque control. More... | |
| bool | getTorqueRange (int j, double *min, double *max) override |
| Get the full scale of the torque sensor of a given joint. More... | |
| bool | getTorqueRanges (double *min, double *max) override |
| Get the full scale of the torque sensors of all joints. More... | |
| Public Member Functions inherited from yarp::dev::ITorqueControl | |
| virtual | ~ITorqueControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementControlLimits | |
| ImplementControlLimits (yarp::dev::IControlLimitsRaw *y) | |
| Constructor. More... | |
| virtual | ~ImplementControlLimits () |
| Destructor. More... | |
| bool | setLimits (int axis, double min, double max) override |
| Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More... | |
| bool | getLimits (int axis, double *min, double *max) override |
| Get the software limits for a particular axis. More... | |
| bool | setVelLimits (int axis, double min, double max) override |
| Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More... | |
| bool | getVelLimits (int axis, double *min, double *max) override |
| Get the software speed limits for a particular axis. More... | |
| Public Member Functions inherited from yarp::dev::IControlLimits | |
| virtual | ~IControlLimits () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementPositionDirect | |
| ImplementPositionDirect (yarp::dev::IPositionDirectRaw *y) | |
| Constructor. More... | |
| virtual | ~ImplementPositionDirect () |
| Destructor. More... | |
| bool | setPosition (int j, double ref) override |
| Set new position for a single axis. More... | |
| bool | setPositions (const int n_joint, const int *joints, const double *refs) override |
| Set new reference point for all axes. More... | |
| bool | setPositions (const double *refs) override |
| Set new position for a set of axis. More... | |
| bool | getRefPosition (const int joint, double *ref) override |
| Get the last position reference for the specified axis. More... | |
| bool | getRefPositions (double *refs) override |
| Get the last position reference for all axes. More... | |
| bool | getRefPositions (const int n_joint, const int *joints, double *refs) override |
| Get the last position reference for the specified group of axes. More... | |
| Public Member Functions inherited from yarp::dev::IPositionDirect | |
| virtual | ~IPositionDirect () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementInteractionMode | |
| ImplementInteractionMode (yarp::dev::IInteractionModeRaw *Class_p) | |
| Constructor. More... | |
| virtual | ~ImplementInteractionMode () |
| Destructor. More... | |
| bool | getInteractionMode (int axis, yarp::dev::InteractionModeEnum *mode) override |
| Get the current interaction mode of the robot, values can be stiff or compliant. More... | |
| bool | getInteractionModes (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| Get the current interaction mode of the robot for a set of joints, values can be stiff or compliant. More... | |
| bool | getInteractionModes (yarp::dev::InteractionModeEnum *modes) override |
| Get the current interaction mode of the robot for a all the joints, values can be stiff or compliant. More... | |
| bool | setInteractionMode (int axis, yarp::dev::InteractionModeEnum mode) override |
| Set the interaction mode of the robot, values can be stiff or compliant. More... | |
| bool | setInteractionModes (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| Set the interaction mode of the robot for a set of joints, values can be stiff or compliant. More... | |
| bool | setInteractionModes (yarp::dev::InteractionModeEnum *modes) override |
| Set the interaction mode of the robot for a all the joints, values can be stiff or compliant. More... | |
| Public Member Functions inherited from yarp::dev::IInteractionMode | |
| virtual | ~IInteractionMode () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementCurrentControl | |
| ImplementCurrentControl (yarp::dev::ICurrentControlRaw *y) | |
| virtual | ~ImplementCurrentControl () |
| Destructor. More... | |
| bool | getNumberOfMotors (int *ax) override |
| Retrieves the number of controlled axes from the current physical interface. More... | |
| bool | getRefCurrent (int j, double *) override |
| Get the reference value of the current for a single motor. More... | |
| bool | getRefCurrents (double *t) override |
| Get the reference value of the currents for all motors. More... | |
| bool | setRefCurrents (const double *t) override |
| Set the reference value of the currents for all motors. More... | |
| bool | setRefCurrent (int j, double t) override |
| Set the reference value of the current for a single motor. More... | |
| bool | setRefCurrents (const int n_joint, const int *joints, const double *t) override |
| Set the reference value of the current for a group of motors. More... | |
| bool | getCurrents (double *t) override |
| Get the instantaneous current measurement for all motors. More... | |
| bool | getCurrent (int j, double *t) override |
| Get the instantaneous current measurement for a single motor. More... | |
| bool | getCurrentRange (int j, double *min, double *max) override |
| Get the full scale of the current measurement for a given motor (e.g. More... | |
| bool | getCurrentRanges (double *min, double *max) override |
| Get the full scale of the current measurements for all motors motor (e.g. More... | |
| Public Member Functions inherited from yarp::dev::ICurrentControl | |
| virtual | ~ICurrentControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementPWMControl | |
| bool | initialize (int k, const int *amap, const double *dutyToPWM) |
| bool | uninitialize () |
| ImplementPWMControl (IPWMControlRaw *v) | |
| ~ImplementPWMControl () | |
| bool | getNumberOfMotors (int *ax) override |
| Retrieves the number of controlled motors from the current physical interface. More... | |
| bool | setRefDutyCycle (int j, double v) override |
| Sets the reference dutycycle to a single motor. More... | |
| bool | setRefDutyCycles (const double *v) override |
| Sets the reference dutycycle for all the motors. More... | |
| bool | getRefDutyCycle (int j, double *v) override |
| Gets the last reference sent using the setRefDutyCycle function. More... | |
| bool | getRefDutyCycles (double *v) override |
| Gets the last reference sent using the setRefDutyCycles function. More... | |
| bool | getDutyCycle (int j, double *v) override |
| Gets the current dutycycle of the output of the amplifier (i.e. More... | |
| bool | getDutyCycles (double *v) override |
| Gets the current dutycycle of the output of the amplifier (i.e. More... | |
| Public Member Functions inherited from yarp::dev::IPWMControl | |
| virtual | ~IPWMControl () |
| Public Member Functions inherited from yarp::dev::ImplementMotor | |
| ImplementMotor (yarp::dev::IMotorRaw *y) | |
| virtual | ~ImplementMotor () |
| bool | getNumberOfMotors (int *num) override |
| Get the number of available motors. More... | |
| bool | getTemperature (int m, double *val) override |
| Get temperature of a motor. More... | |
| bool | getTemperatures (double *vals) override |
| Get temperature of all the motors. More... | |
| bool | getTemperatureLimit (int m, double *val) override |
| Retreives the current temperature limit for a specific motor. More... | |
| bool | setTemperatureLimit (int m, const double val) override |
| Set the temperature limit for a specific motor. More... | |
| bool | getGearboxRatio (int m, double *val) override |
| Get the gearbox ratio for a specific motor. More... | |
| bool | setGearboxRatio (int m, const double val) override |
| Set the gearbox ratio for a specific motor. More... | |
| Public Member Functions inherited from yarp::dev::IMotor | |
| virtual | ~IMotor () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementAxisInfo | |
| ImplementAxisInfo (yarp::dev::IAxisInfoRaw *y) | |
| virtual | ~ImplementAxisInfo () |
| bool | getAxisName (int axis, std::string &name) override |
| bool | getJointType (int axis, yarp::dev::JointTypeEnum &type) override |
| Public Member Functions inherited from yarp::dev::IAxisInfo | |
| virtual | ~IAxisInfo () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::ImplementVirtualAnalogSensor | |
| bool | initialize (int k, const int *amap, const double *userToRaw) |
| bool | uninitialize () |
| ImplementVirtualAnalogSensor (IVirtualAnalogSensorRaw *virt) | |
| ~ImplementVirtualAnalogSensor () | |
| VAS_status | getVirtualAnalogSensorStatus (int ch) override |
| Check the status of a given channel. More... | |
| int | getVirtualAnalogSensorChannels () override |
| Get the number of channels of the virtual sensor. More... | |
| bool | updateVirtualAnalogSensorMeasure (yarp::sig::Vector &measure) override |
| Set a vector of torque values for virtual sensor. More... | |
| bool | updateVirtualAnalogSensorMeasure (int ch, double &measure) override |
| Public Member Functions inherited from yarp::dev::IVirtualAnalogSensor | |
| virtual | ~IVirtualAnalogSensor () |
Additional Inherited Members | |
| Protected Member Functions inherited from yarp::os::PeriodicThread | |
| virtual void | beforeStart () |
| Called just before a new thread starts. More... | |
| virtual void | afterStart (bool success) |
| Called just after a new thread starts (or fails to start), this is executed by the same thread that calls start(). More... | |
| Protected Member Functions inherited from yarp::dev::ImplementControlCalibration | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementAmplifierControl | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos, const double *ampereFactor=NULL, const double *voltFactor=NULL) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementPidControl | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos, const double *newtons, const double *amps, const double *dutys) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| bool | setConversionUnits (const PidControlTypeEnum &pidtype, const PidFeedbackUnitsEnum fbk_conv_units, const PidOutputUnitsEnum out_conv_units) |
| Protected Member Functions inherited from yarp::dev::ImplementEncodersTimed | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementPositionControl | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementVelocityControl | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementImpedanceControl | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos, const double *nw) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementMotorEncoders | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementTorqueControl | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos, const double *nw, const double *amps, const double *dutys, const double *bemfs, const double *ktaus) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementControlLimits | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementPositionDirect | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementInteractionMode | |
| bool | initialize (int size, const int *amap) |
| Initialize the internal data and alloc memory, smaller version. More... | |
| bool | initialize (int size, const int *amap, const double *enc, const double *zos) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementCurrentControl | |
| bool | initialize (int size, const int *amap, const double *ampsToSens) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementMotor | |
| bool | initialize (int size, const int *amap) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Member Functions inherited from yarp::dev::ImplementAxisInfo | |
| bool | initialize (int size, const int *amap) |
| Initialize the internal data and alloc memory. More... | |
| bool | uninitialize () |
| Clean up internal data and memory. More... | |
| Protected Attributes inherited from yarp::dev::ImplementControlCalibration | |
| IControlCalibrationRaw * | iCalibrate |
| void * | helper |
| double * | temp |
| Protected Attributes inherited from yarp::dev::ImplementAmplifierControl | |
| IAmplifierControlRaw * | iAmplifier |
| void * | helper |
| double * | dTemp |
| int * | iTemp |
| Protected Attributes inherited from yarp::dev::ImplementPidControl | |
| IPidControlRaw * | iPid |
| void * | helper |
| yarp::dev::impl::FixedSizeBuffersManager< double > * | doubleBuffManager |
| yarp::dev::impl::FixedSizeBuffersManager< yarp::dev::Pid > * | pidBuffManager |
| Protected Attributes inherited from yarp::dev::ImplementEncodersTimed | |
| IEncodersTimedRaw * | iEncoders |
| void * | helper |
| yarp::dev::impl::FixedSizeBuffersManager< double > * | buffManager |
| Protected Attributes inherited from yarp::dev::ImplementPositionControl | |
| IPositionControlRaw * | iPosition |
| void * | helper |
| yarp::dev::impl::FixedSizeBuffersManager< int > * | intBuffManager |
| yarp::dev::impl::FixedSizeBuffersManager< double > * | doubleBuffManager |
| yarp::dev::impl::FixedSizeBuffersManager< bool > * | boolBuffManager |
| Protected Attributes inherited from yarp::dev::ImplementVelocityControl | |
| IVelocityControlRaw * | iVelocity |
| void * | helper |
| yarp::dev::impl::FixedSizeBuffersManager< int > * | intBuffManager |
| yarp::dev::impl::FixedSizeBuffersManager< double > * | doubleBuffManager |
| Protected Attributes inherited from yarp::dev::ImplementImpedanceControl | |
| yarp::dev::IImpedanceControlRaw * | iImpedanceRaw |
| void * | helper |
| Protected Attributes inherited from yarp::dev::ImplementMotorEncoders | |
| IMotorEncodersRaw * | iMotorEncoders |
| void * | helper |
| yarp::dev::impl::FixedSizeBuffersManager< double > * | buffManager |
| Protected Attributes inherited from yarp::dev::ImplementTorqueControl | |
| yarp::dev::ITorqueControlRaw * | iTorqueRaw |
| void * | helper |
| yarp::dev::impl::FixedSizeBuffersManager< int > * | intBuffManager |
| yarp::dev::impl::FixedSizeBuffersManager< double > * | doubleBuffManager |
| Protected Attributes inherited from yarp::dev::ImplementControlLimits | |
| IControlLimitsRaw * | iLimits2 |
| void * | helper |
| Protected Attributes inherited from yarp::dev::ImplementPositionDirect | |
| IPositionDirectRaw * | iPDirect |
| void * | helper |
| yarp::dev::impl::FixedSizeBuffersManager< int > * | intBuffManager |
| yarp::dev::impl::FixedSizeBuffersManager< double > * | doubleBuffManager |
| Protected Attributes inherited from yarp::dev::ImplementInteractionMode | |
| yarp::dev::IInteractionModeRaw * | iInteraction |
| void * | helper |
| yarp::dev::impl::FixedSizeBuffersManager< yarp::dev::InteractionModeEnum > * | imodeBuffManager |
| yarp::dev::impl::FixedSizeBuffersManager< int > * | intBuffManager |
| Protected Attributes inherited from yarp::dev::ImplementCurrentControl | |
| yarp::dev::ICurrentControlRaw * | iCurrentRaw |
| void * | helper |
| yarp::dev::impl::FixedSizeBuffersManager< int > * | intBuffManager |
| yarp::dev::impl::FixedSizeBuffersManager< double > * | doubleBuffManager |
| Protected Attributes inherited from yarp::dev::ImplementMotor | |
| IMotorRaw * | imotor |
| void * | helper |
| yarp::dev::impl::FixedSizeBuffersManager< double > * | doubleBuffManager |
| Protected Attributes inherited from yarp::dev::ImplementAxisInfo | |
| IAxisInfoRaw * | iinfo |
| void * | helper |
| double * | temp1 |
| double * | temp2 |
fakeMotionControl: Documentation to be added
The aim of this device is to mimic the expected behavior of a real motion control device to help testing the high level software.
This device is implementing last version of interfaces and it is compatible with ControlBoardWrapper2 device.
WIP - it is very basic now, not all interfaces are implemented yet.
Definition at line 86 of file fakeMotionControl.h.
| FakeMotionControl::FakeMotionControl | ( | ) |
Definition at line 358 of file fakeMotionControl.cpp.
| FakeMotionControl::~FakeMotionControl | ( | ) |
Definition at line 463 of file fakeMotionControl.cpp.
| bool FakeMotionControl::alloc | ( | int | njoints | ) |
Allocated buffers.
Definition at line 191 of file fakeMotionControl.cpp.
|
overridevirtual |
Start calibration, this method is very often platform specific.
Implements yarp::dev::IControlCalibrationRaw.
Definition at line 1863 of file fakeMotionControl.cpp.
|
overridevirtual |
Check if the calibration is terminated, on a particular joint.
Non blocking.
Implements yarp::dev::IControlCalibrationRaw.
Definition at line 1869 of file fakeMotionControl.cpp.
|
overridevirtual |
Check if the current trajectory is terminated.
Non blocking.
| flag | is a pointer to return value ("and" of all joints) |
Implements yarp::dev::IPositionControlRaw.
Definition at line 1970 of file fakeMotionControl.cpp.
|
overridevirtual |
Check if the current trajectory is terminated.
Non blocking.
| joints | pointer to the array of joint numbers |
| flag | true if the trajectory is terminated, false otherwise (a single value which is the 'and' of all joints') |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2125 of file fakeMotionControl.cpp.
|
overridevirtual |
Check if the current trajectory is terminated.
Non blocking.
| j | is the axis number |
| flag | is a pointer to return value |
Implements yarp::dev::IPositionControlRaw.
Definition at line 1961 of file fakeMotionControl.cpp.
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 1430 of file fakeMotionControl.cpp.
|
overridevirtual |
Disable the amplifier on a specific joint.
All computations within the board will be carried out normally, but the output will be disabled.
Implements yarp::dev::IAmplifierControlRaw.
Definition at line 2511 of file fakeMotionControl.cpp.
|
overridevirtual |
Disable the pid computation for a joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
Implements yarp::dev::IPidControlRaw.
Definition at line 1701 of file fakeMotionControl.cpp.
|
overridevirtual |
Enable the amplifier on a specific joint.
Be careful, check that the output of the controller is appropriate (usually zero), to avoid generating abrupt movements.
Implements yarp::dev::IAmplifierControlRaw.
Definition at line 2506 of file fakeMotionControl.cpp.
|
overridevirtual |
Enable the pid computation for a joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
Implements yarp::dev::IPidControlRaw.
Definition at line 1723 of file fakeMotionControl.cpp.
| bool FakeMotionControl::fromConfig | ( | yarp::os::Searchable & | config | ) |
Definition at line 854 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IAmplifierControlRaw.
Definition at line 2552 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IAmplifierControlRaw.
Definition at line 2546 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the number of controlled axes.
This command asks the number of controlled axes for the current physical interface.
Implements yarp::dev::IImpedanceControlRaw.
Definition at line 1880 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IAxisInfoRaw.
Definition at line 2689 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IControlModeRaw.
Definition at line 2213 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IControlModeRaw.
Definition at line 2233 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IControlModeRaw.
Definition at line 2223 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the current impedandance limits for a specific joint.
Implements yarp::dev::IImpedanceControlRaw.
Definition at line 2804 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the full scale of the current measurement for a given motor (e.g.
-20A +20A) Reference values set by user with methods such as setRefCurrent() should be in this range. This method is not related to the current overload protection methods belonging to the iAmplifierControl interface.
| m | motor number |
| min | minimum current of the motor m |
| max | maximum current of the motor m |
Implements yarp::dev::ICurrentControlRaw.
Definition at line 3121 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the full scale of the current measurements for all motors motor (e.g.
-20A +20A) Reference values set by user with methods such as setRefCurrent() should be in this range. This method is not related to the current overload protection methods belonging to the iAmplifierControl interface.
| min | pointer to the array that will store minimum currents |
| max | pointer to the array that will store maximum currents |
Implements yarp::dev::ICurrentControlRaw.
Definition at line 3129 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IAmplifierControlRaw.
Definition at line 2516 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IAmplifierControlRaw.
Definition at line 2523 of file fakeMotionControl.cpp.
|
overridevirtual |
Gets the current dutycycle of the output of the amplifier (i.e.
pwm value sent to the motor)
| m | motor number |
| val | pointer to storage for return value, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControlRaw.
Definition at line 3094 of file fakeMotionControl.cpp.
|
overridevirtual |
Gets the current dutycycle of the output of the amplifier (i.e.
pwm values sent to all motors)
| vals | pointer to the vector that will store the values, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControlRaw.
Definition at line 3100 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous acceleration of an axis.
| j | axis number |
| spds | pointer to the array that will contain the output |
Implements yarp::dev::IEncodersRaw.
Definition at line 2355 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous acceleration of all axes.
| accs | pointer to the array that will contain the output |
Implements yarp::dev::IEncodersRaw.
Definition at line 2363 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the value of an encoder.
| j | encoder number |
| v | pointer to storage for the return value |
Implements yarp::dev::IEncodersRaw.
Definition at line 2315 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous speed of an axis.
| j | axis number |
| sp | pointer to storage for the output |
Implements yarp::dev::IEncodersRaw.
Definition at line 2338 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous acceleration of an axis.
| spds | pointer to storage for the output values |
Implements yarp::dev::IEncodersRaw.
Definition at line 2345 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the position of all axes.
| encs | pointer to the array that will contain the output |
Implements yarp::dev::IEncodersRaw.
Definition at line 2326 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous acceleration of all axes.
| encs | pointer to the array that will contain the output |
| stamps | pointer to the array that will contain individual timestamps |
Implements yarp::dev::IEncodersTimedRaw.
Definition at line 2375 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous acceleration of all axes.
| j | axis index |
| encs | encoder value |
| stamp | corresponding timestamp |
Implements yarp::dev::IEncodersTimedRaw.
Definition at line 2385 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the gearbox ratio for a specific motor.
| m | motor number |
| val | retrieved gearbox ratio |
Reimplemented from yarp::dev::IMotorRaw.
Definition at line 2623 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2664 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2674 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2669 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2659 of file fakeMotionControl.cpp.
|
overridevirtual |
Get current force Offset for a specific joint.
Implements yarp::dev::IImpedanceControlRaw.
Definition at line 2799 of file fakeMotionControl.cpp.
|
overridevirtual |
Get current impedance parameters (stiffness,damping,offset) for a specific joint.
Implements yarp::dev::IImpedanceControlRaw.
Definition at line 2784 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the current interaction mode of the robot, values can be stiff or compliant.
| axis | joint number |
| mode | contains the requested information about interaction mode of the joint |
Implements yarp::dev::IInteractionModeRaw.
Definition at line 2968 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the current interaction mode of the robot for a set of joints, values can be stiff or compliant.
| n_joints | how many joints this command is referring to |
| joints | list of joints controlled. The size of this array is n_joints |
| modes | array containing the requested information about interaction mode, one value for each joint, the size is n_joints. for example: n_joint 3 joints 0 2 4 refs VOCAB_IM_STIFF VOCAB_IM_STIFF VOCAB_IM_COMPLIANT |
Implements yarp::dev::IInteractionModeRaw.
Definition at line 2976 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the current interaction mode of the robot for a all the joints, values can be stiff or compliant.
| mode | array containing the requested information about interaction mode, one value for each joint. |
Implements yarp::dev::IInteractionModeRaw.
Definition at line 2987 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2638 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2643 of file fakeMotionControl.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAxisInfoRaw.
Definition at line 2703 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2653 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the software limits for a particular axis.
| axis | joint number |
| pointer | to store the value of the lower limit |
| pointer | to store the value of the upper limit |
Implements yarp::dev::IControlLimitsRaw.
Definition at line 2618 of file fakeMotionControl.cpp.
|
overridevirtual |
Returns the maximum electric current allowed for a given motor.
Exceeding this value will trigger instantaneous hardware fault.
| j | motor number |
| v | the return value |
Implements yarp::dev::IAmplifierControlRaw.
Definition at line 2540 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous acceleration of a motor encoder.
| m | motor number |
| acc | pointer to the array that will contain the output |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2466 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous acceleration of all motor encoders.
| accs | pointer to the array that will contain the output |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2472 of file fakeMotionControl.cpp.
|
overridevirtual |
Gets number of counts per revolution for motor encoder m.
| m | motor number |
| cpr | vals pointer to the new value |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2418 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the value of a motor encoder.
| m | motor encoder number |
| v | pointer to storage for the return value |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2433 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the istantaneous speed of a motor encoder.
| m | motor number |
| sp | pointer to storage for the output |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2450 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous speed of all motor encoders.
| spds | pointer to storage for the output values |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2456 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the position of all motor encoders.
| encs | pointer to the array that will contain the output |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2439 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous position of all motor encoders.
| encs | pointer to the array that will contain the output |
| time | pointer to the array that will contain individual timestamps |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2482 of file fakeMotionControl.cpp.
|
overridevirtual |
Read the instantaneous position of a motor encoder.
| m | motor index |
| encs | encoder value (pointer to) |
| time | corresponding timestamp (pointer to) |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2493 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2679 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the motor parameters.
| j | joint number |
| params | a struct containing the motor parameters to be retrieved |
Reimplemented from yarp::dev::ITorqueControlRaw.
Definition at line 2809 of file fakeMotionControl.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControlRaw.
Definition at line 2574 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the number of available motor encoders.
| m | pointer to a value representing the number of available motor encoders. |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2397 of file fakeMotionControl.cpp.
|
overridevirtual |
Retrieves the number of controlled motors from the current physical interface.
| number | returns the number of controlled motors. |
Implements yarp::dev::ICurrentControlRaw.
Definition at line 3030 of file fakeMotionControl.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControlRaw.
Definition at line 2562 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the error limit for the controller on a specific joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| limit | pointer to storage |
Implements yarp::dev::IPidControlRaw.
Definition at line 1664 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the error limit for all controllers.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| limits | pointer to the array that will store the output |
Implements yarp::dev::IPidControlRaw.
Definition at line 1686 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the current error for a joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| err | pointer to the storage for the return value |
Implements yarp::dev::IPidControlRaw.
Definition at line 1561 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the error of all joints.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| errs | pointer to the vector that will store the errors |
Implements yarp::dev::IPidControlRaw.
Definition at line 1583 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the output of the controller (e.g.
pwm value)
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| out | pointer to storage for return value |
Implements yarp::dev::IPidControlRaw.
Definition at line 1790 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the output of the controllers (e.g.
pwm value)
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| outs | pinter to the vector that will store the output values |
Implements yarp::dev::IPidControlRaw.
Definition at line 1813 of file fakeMotionControl.cpp.
|
overridevirtual |
Get current pid value for a specific joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| pid | pointer to storage for the return value. |
Implements yarp::dev::IPidControlRaw.
Definition at line 1593 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the current reference of the pid controller for a specific joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| ref | pointer to storage for return value |
Implements yarp::dev::IPidControlRaw.
Definition at line 1629 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the current reference of all pid controllers.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| refs | vector that will store the output. |
Implements yarp::dev::IPidControlRaw.
Definition at line 1651 of file fakeMotionControl.cpp.
|
overridevirtual |
Get current pid value for a specific joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| pids | vector that will store the values of the pids. |
Implements yarp::dev::IPidControlRaw.
Definition at line 1616 of file fakeMotionControl.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControlRaw.
Definition at line 2604 of file fakeMotionControl.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControlRaw.
Definition at line 2592 of file fakeMotionControl.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControlRaw.
Definition at line 2586 of file fakeMotionControl.cpp.
|
overridevirtual |
Get reference acceleration for a joint.
Returns the acceleration used to generate the trajectory profile.
| j | joint number |
| acc | pointer to storage for the return value |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2062 of file fakeMotionControl.cpp.
|
overridevirtual |
Get reference acceleration for a joint.
Returns the acceleration used to generate the trajectory profile.
| joints | pointer to the array of joint numbers |
| accs | pointer to the array that will store the acceleration values |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2182 of file fakeMotionControl.cpp.
|
overridevirtual |
Get reference acceleration of all joints.
These are the values used during the interpolation of the trajectory.
| accs | pointer to the array that will store the acceleration values. |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2068 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the reference value of the current for a single motor.
| m | motor number |
| curr | the current reference value for motor m |
Implements yarp::dev::ICurrentControlRaw.
Definition at line 3176 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the reference value of the currents for all motors.
| currs | pointer to the array to be filled with reference current values. |
Implements yarp::dev::ICurrentControlRaw.
Definition at line 3167 of file fakeMotionControl.cpp.
|
overridevirtual |
Gets the last reference sent using the setRefDutyCycleRaw function.
| m | motor number |
| ref | pointer to storage for return value, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControlRaw.
Definition at line 3079 of file fakeMotionControl.cpp.
|
overridevirtual |
Gets the last reference sent using the setRefDutyCyclesRaw function.
| refs | pointer to the vector that will store the values, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControlRaw.
Definition at line 3085 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the last position reference for the specified axis.
This is the dual of setPositionsRaw and shall return only values sent using IPositionDirect interface. If other interfaces like IPositionControl are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionControl::PositionMove.
| ref | last reference sent using setPosition(s) functions |
Reimplemented from yarp::dev::IPositionDirectRaw.
Definition at line 2928 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the last position reference for the specified group of axes.
This is the dual of setPositionsRaw and shall return only values sent using IPositionDirect interface. If other interfaces like IPositionControl are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionControl::PositionMove.
| ref | array containing last reference sent using setPosition(s) functions |
Reimplemented from yarp::dev::IPositionDirectRaw.
Definition at line 2956 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the last position reference for all axes.
This is the dual of setPositionsRaw and shall return only values sent using IPositionDirect interface. If other interfaces like IPositionControl are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionControl::PositionMove.
| ref | array containing last reference sent using setPosition(s) functions |
Reimplemented from yarp::dev::IPositionDirectRaw.
Definition at line 2946 of file fakeMotionControl.cpp.
|
overridevirtual |
Get reference speed for a joint.
Returns the speed used to generate the trajectory profile.
| j | joint number |
| ref | pointer to storage for the return value |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2050 of file fakeMotionControl.cpp.
|
overridevirtual |
Get reference speed of all joints.
These are the values used during the interpolation of the trajectory.
| joints | pointer to the array of joint numbers |
| spds | pointer to the array that will store the speed values. |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2169 of file fakeMotionControl.cpp.
|
overridevirtual |
Get reference speed of all joints.
These are the values used during the interpolation of the trajectory.
| spds | pointer to the array that will store the speed values. |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2056 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the reference value of the torque for a given joint.
This is NOT the feedback (see getTorque instead).
| j | joint number |
| t | new value |
Implements yarp::dev::ITorqueControlRaw.
Definition at line 2779 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the reference value of the torque for all joints.
This is NOT the feedback (see getTorques instead).
| t | pointer to the array of torque values |
Implements yarp::dev::ITorqueControlRaw.
Definition at line 2774 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the last reference speed set by velocityMove for a group of joints.
| n_joint | how many joints this command is referring to |
| joints | of joints controlled. The size of this array is n_joints |
| vels | pointer to the array containing the requested values, one value for each joint. The size of the array is n_joints. |
Reimplemented from yarp::dev::IVelocityControlRaw.
Definition at line 2918 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the last reference speed set by velocityMove for all joints.
| vels | pointer to the array containing the new speed values, one value for each joint |
Reimplemented from yarp::dev::IVelocityControlRaw.
Definition at line 2908 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the last reference speed set by velocityMove for single joint.
| j | joint number |
| vel | returns the requested reference. |
Reimplemented from yarp::dev::IVelocityControlRaw.
Definition at line 2902 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2633 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2648 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2684 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the last position reference for the specified axis.
This is the dual of PositionMove and shall return only values sent using IPositionControl interface. If other interfaces like IPositionDirect are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionDirect::SetPosition
| ref | last reference sent using PositionMove functions |
Reimplemented from yarp::dev::IPositionControlRaw.
Definition at line 2866 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the last position reference for the specified group of axes.
This is the dual of PositionMove and shall return only values sent using IPositionControl interface. If other interfaces like IPositionDirect are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionDirect::SetPosition
| ref | last reference sent using PositionMove functions |
Reimplemented from yarp::dev::IPositionControlRaw.
Definition at line 2892 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the last position reference for all axes.
This is the dual of PositionMove and shall return only values sent using IPositionControl interface. If other interfaces like IPositionDirect are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionDirect::SetPosition
| ref | last reference sent using PositionMove functions |
Reimplemented from yarp::dev::IPositionControlRaw.
Definition at line 2884 of file fakeMotionControl.cpp.
|
overridevirtual |
Retreives the current temperature limit for a specific motor.
The specific behavior of the motor when the temperature limit is exceeded depends on the implementation (power off recommended)
| m | motor number |
| temp | the current temperature limit. |
Implements yarp::dev::IMotorRaw.
Definition at line 3051 of file fakeMotionControl.cpp.
|
overridevirtual |
Get temperature of a motor.
| m | motor number |
| val | retrieved motor temperature |
Implements yarp::dev::IMotorRaw.
Definition at line 3036 of file fakeMotionControl.cpp.
|
overridevirtual |
Get temperature of all the motors.
| vals | pointer to an array containing all motor temperatures |
Implements yarp::dev::IMotorRaw.
Definition at line 3041 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 2628 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the full scale of the torque sensor of a given joint.
| j | joint number |
| min | minimum torque of the joint j |
| max | maximum torque of the joint j |
Implements yarp::dev::ITorqueControlRaw.
Definition at line 2746 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the full scale of the torque sensors of all joints.
| min | pointer to the array that will store minimum torques of the joints |
| max | pointer to the array that will store maximum torques of the joints |
Implements yarp::dev::ITorqueControlRaw.
Definition at line 2751 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the value of the torque on a given joint (this is the feedback if you have a torque sensor).
| j | joint number |
Implements yarp::dev::ITorqueControlRaw.
Definition at line 2731 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the value of the torque for all joints (this is the feedback if you have torque sensors).
| t | pointer to the array that will store the output |
Implements yarp::dev::ITorqueControlRaw.
Definition at line 2737 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the software speed limits for a particular axis.
| axis | joint number |
| min | pointer to store the value of the lower limit |
| max | pointer to store the value of the upper limit |
Implements yarp::dev::IControlLimitsRaw.
Definition at line 2722 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the number of channels of the virtual sensor.
Implements yarp::dev::IVirtualAnalogSensorRaw.
Definition at line 3192 of file fakeMotionControl.cpp.
|
overridevirtual |
Check the status of a given channel.
| ch | channel number. |
Implements yarp::dev::IVirtualAnalogSensorRaw.
Definition at line 3187 of file fakeMotionControl.cpp.
|
virtual |
Definition at line 469 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the current status (enabled/disabled) of the pid controller.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| enabled | the current status of the pid controller. |
Implements yarp::dev::IPidControlRaw.
Definition at line 1768 of file fakeMotionControl.cpp.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. See device invocation examples. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 499 of file fakeMotionControl.cpp.
|
overridevirtual |
Set new reference point for all axes.
| refs | array, new reference points. |
Implements yarp::dev::IPositionControlRaw.
Definition at line 1911 of file fakeMotionControl.cpp.
|
overridevirtual |
Set new reference point for a subset of joints.
| joints | pointer to the array of joint numbers |
| refs | pointer to the array specifies the new reference points |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2094 of file fakeMotionControl.cpp.
|
overridevirtual |
Set new reference point for a single axis.
| j | joint number |
| ref | specifies the new ref point |
Implements yarp::dev::IPositionControlRaw.
Definition at line 1887 of file fakeMotionControl.cpp.
|
overridevirtual |
Set relative position, all joints.
| deltas | pointer to the relative commands |
Implements yarp::dev::IPositionControlRaw.
Definition at line 1947 of file fakeMotionControl.cpp.
|
overridevirtual |
Set relative position for a subset of joints.
| joints | pointer to the array of joint numbers |
| deltas | pointer to the array of relative commands |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2112 of file fakeMotionControl.cpp.
|
overridevirtual |
Set relative position.
The command is relative to the current position of the axis.
| j | joint axis number |
| delta | relative command |
Implements yarp::dev::IPositionControlRaw.
Definition at line 1924 of file fakeMotionControl.cpp.
|
overridevirtual |
Reset encoder, single joint.
Set the encoder value to zero
| j | encoder number |
Implements yarp::dev::IEncodersRaw.
Definition at line 2305 of file fakeMotionControl.cpp.
|
overridevirtual |
Reset encoders.
Set the encoders value to zero
Implements yarp::dev::IEncodersRaw.
Definition at line 2310 of file fakeMotionControl.cpp.
|
overridevirtual |
Reset motor encoder, single motor.
Set the encoder value to zero.
| m | motor number |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2423 of file fakeMotionControl.cpp.
|
overridevirtual |
Reset motor encoders.
Set the motor encoders value to zero.
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2428 of file fakeMotionControl.cpp.
|
overridevirtual |
Reset the controller of a given joint, usually sets the current status of the joint as the reference value for the PID, and resets the integrator.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
Implements yarp::dev::IPidControlRaw.
Definition at line 1696 of file fakeMotionControl.cpp.
| void FakeMotionControl::resizeBuffers | ( | ) |
Resize previously allocated buffers.
Definition at line 151 of file fakeMotionControl.cpp.
|
overridevirtual |
Loop function.
This is the thread itself. The thread calls the run() function every <period> ms. At the end of each run, the thread will sleep the amounth of time required, taking into account the time spent inside the loop function. Example: requested period is 10ms, the run() function take 3ms to be executed, the thread will sleep for 7ms.
Note: after each run is completed, the thread will call a yield() in order to facilitate other threads to run.
Implements yarp::os::PeriodicThread.
Definition at line 40 of file fakeMotionControl.cpp.
|
overridevirtual |
Start calibration, this method is very often platform specific.
Reimplemented from yarp::dev::IControlCalibrationRaw.
Definition at line 1857 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IControlModeRaw.
Definition at line 2248 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IControlModeRaw.
Definition at line 2266 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IControlModeRaw.
Definition at line 2279 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the value of the encoder for a given joint.
| j | encoder number |
| val | new value |
Implements yarp::dev::IEncodersRaw.
Definition at line 2295 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the value of all encoders.
| vals | pointer to the new values |
Implements yarp::dev::IEncodersRaw.
Definition at line 2300 of file fakeMotionControl.cpp.
|
overridevirtual |
Set current force Offset for a specific joint.
Implements yarp::dev::IImpedanceControlRaw.
Definition at line 2794 of file fakeMotionControl.cpp.
|
overridevirtual |
Set current impedance parameters (stiffness,damping) for a specific joint.
Implements yarp::dev::IImpedanceControlRaw.
Definition at line 2789 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the interaction mode of the robot, values can be stiff or compliant.
Please note that some robot may not implement certain types of interaction, so always check the return value.
| axis | joint number |
| mode | the desired interaction mode |
Implements yarp::dev::IInteractionModeRaw.
Definition at line 2998 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the interaction mode of the robot for a set of joints, values can be stiff or compliant.
Please note that some robot may not implement certain types of interaction, so always check the return value.
| n_joints | how many joints this command is referring to |
| joints | list of joints controlled. The size of this array is n_joints |
| modes | array containing the desired interaction mode, one value for each joint, the size is n_joints. for example: n_joint 3 joints 0 2 4 refs VOCAB_IM_STIFF VOCAB_IM_STIFF VOCAB_IM_COMPLIANT |
Implements yarp::dev::IInteractionModeRaw.
Definition at line 3009 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the interaction mode of the robot for a all the joints, values can be stiff or compliant.
Some robot may not implement some types of interaction, so always check the return value
| mode | array with the desired interaction mode for all joints, length is the total number of joints for the part |
Implements yarp::dev::IInteractionModeRaw.
Definition at line 3019 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation.
| axis | joint number (why am I telling you this) |
| min | the value of the lower limit |
| max | the value of the upper limit |
Implements yarp::dev::IControlLimitsRaw.
Definition at line 2612 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IAmplifierControlRaw.
Definition at line 2534 of file fakeMotionControl.cpp.
|
overridevirtual |
Sets number of counts per revolution for motor encoder m.
| m | motor number |
| cpr | new value |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2413 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the value of the motor encoder for a given motor.
| m | motor number |
| val | new value |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2403 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the value of all motor encoders.
| vals | pointer to the new values |
Implements yarp::dev::IMotorEncodersRaw.
Definition at line 2408 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the motor parameters.
| j | joint number |
| params | a struct containing the motor parameters to be set |
Reimplemented from yarp::dev::ITorqueControlRaw.
Definition at line 2819 of file fakeMotionControl.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControlRaw.
Definition at line 2580 of file fakeMotionControl.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControlRaw.
Definition at line 2568 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the error limit for the controller on a specific joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| limit | limit value |
Implements yarp::dev::IPidControlRaw.
Definition at line 1529 of file fakeMotionControl.cpp.
|
overridevirtual |
Get the error limit for the controller on all joints.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| limits | pointer to the vector with the new limits |
Implements yarp::dev::IPidControlRaw.
Definition at line 1551 of file fakeMotionControl.cpp.
|
overridevirtual |
Set an offset value on the ourput of pid controller.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| v | the offset to be added to the output of the pid controller |
Implements yarp::dev::IPidControlRaw.
Definition at line 1745 of file fakeMotionControl.cpp.
|
overridevirtual |
Set new pid value for a joint axis.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| pid | new pid value |
Implements yarp::dev::IPidControlRaw.
Definition at line 1464 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the controller reference for a given axis.
Warning this method can result in very large torques and should be used carefully. If you do not understand this warning you should avoid using this method. Have a look at other interfaces (e.g. position control).
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| ref | new reference point |
Implements yarp::dev::IPidControlRaw.
Definition at line 1497 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the controller reference, multiple axes.
Warning this method can result in very large torques and should be used carefully. If you do not understand this warning you should avoid using this method. Have a look at other interfaces (e.g. position control).
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| refs | pointer to the vector that contains the new reference points. |
Implements yarp::dev::IPidControlRaw.
Definition at line 1519 of file fakeMotionControl.cpp.
|
overridevirtual |
Set new pid value on multiple axes.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| pids | pointer to a vector of pids |
Implements yarp::dev::IPidControlRaw.
Definition at line 1487 of file fakeMotionControl.cpp.
|
overridevirtual |
Set new position for a single axis.
| j | joint number |
| ref | specifies the new ref point |
Implements yarp::dev::IPositionDirectRaw.
Definition at line 2841 of file fakeMotionControl.cpp.
|
overridevirtual |
Set new position for a set of axes.
| refs | specifies the new reference points |
Implements yarp::dev::IPositionDirectRaw.
Definition at line 2856 of file fakeMotionControl.cpp.
|
overridevirtual |
Set new reference point for all axes.
| n_joint | how many joints this command is referring to |
| joints | list of joints controlled. The size of this array is n_joints |
| refs | array, new reference points, one value for each joint, the size is n_joints. The first value will be the new reference for the joint joints[0]. for example: n_joint 3 joints 0 2 4 refs 10 30 40 |
Implements yarp::dev::IPositionDirectRaw.
Definition at line 2847 of file fakeMotionControl.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControlRaw.
Definition at line 2598 of file fakeMotionControl.cpp.
|
overridevirtual |
Set reference acceleration for a joint.
This value is used during the trajectory generation.
| j | joint number |
| acc | acceleration value |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2007 of file fakeMotionControl.cpp.
|
overridevirtual |
Set reference acceleration on all joints.
This is the valure that is used during the generation of the trajectory.
| accs | pointer to the array of acceleration values |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2028 of file fakeMotionControl.cpp.
|
overridevirtual |
Set reference acceleration on all joints.
This is the valure that is used during the generation of the trajectory.
| joints | pointer to the array of joint numbers |
| accs | pointer to the array with acceleration values |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2156 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the reference value of the current for a single motor.
| m | motor number |
| curr | the current reference value for motor m |
Implements yarp::dev::ICurrentControlRaw.
Definition at line 3150 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the reference value of the currents for all motors.
| currs | the array containt the reference current values |
Implements yarp::dev::ICurrentControlRaw.
Definition at line 3140 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the reference value of the current for a group of motors.
| n_motor | size of motors ans currs arrays |
| motors | pointer to the array of motor numbers |
| refs | pointer to the array specifying the new current reference |
Implements yarp::dev::ICurrentControlRaw.
Definition at line 3157 of file fakeMotionControl.cpp.
|
overridevirtual |
Sets the reference dutycycle of a single motor.
| m | motor number |
| ref | the dutycycle, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControlRaw.
Definition at line 3062 of file fakeMotionControl.cpp.
|
overridevirtual |
Sets the reference dutycycle for all motors.
| refs | the dutycycle, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControlRaw.
Definition at line 3070 of file fakeMotionControl.cpp.
|
overridevirtual |
Set reference speed for a joint, this is the speed used during the interpolation of the trajectory.
| j | joint number |
| sp | speed value |
Implements yarp::dev::IPositionControlRaw.
Definition at line 1987 of file fakeMotionControl.cpp.
|
overridevirtual |
Set reference speed on all joints.
These values are used during the interpolation of the trajectory.
| spds | pointer to the array of speed values. |
Implements yarp::dev::IPositionControlRaw.
Definition at line 1996 of file fakeMotionControl.cpp.
|
overridevirtual |
Set reference speed on all joints.
These values are used during the interpolation of the trajectory.
| joints | pointer to the array of joint numbers |
| spds | pointer to the array with speed values. |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2143 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the reference value of the torque for a given joint.
| j | joint number |
| t | new value |
Implements yarp::dev::ITorqueControlRaw.
Definition at line 2764 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the reference value of the torque for all joints.
| t | pointer to the array of torque values |
Implements yarp::dev::ITorqueControlRaw.
Definition at line 2756 of file fakeMotionControl.cpp.
|
overridevirtual |
Set new torque reference for a subset of joints.
| joints | pointer to the array of joint numbers |
| refs | pointer to the array specifying the new torque reference |
Reimplemented from yarp::dev::ITorqueControlRaw.
Definition at line 2769 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the temperature limit for a specific motor.
The specific behavior of the motor when the temperature limit is exceeded depends on the implementation (power off recommended)
| m | motor number |
| temp | the temperature limit to be set |
Implements yarp::dev::IMotorRaw.
Definition at line 3056 of file fakeMotionControl.cpp.
|
overridevirtual |
Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation.
| axis | joint number |
| min | the value of the lower limit |
| max | the value of the upper limit |
Implements yarp::dev::IControlLimitsRaw.
Definition at line 2717 of file fakeMotionControl.cpp.
|
overridevirtual |
Stop motion, multiple joints.
Implements yarp::dev::IPositionControlRaw.
Definition at line 2079 of file fakeMotionControl.cpp.
|
overridevirtual |
Stop motion for subset of joints.
| joints | pointer to the array of joint numbers |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2195 of file fakeMotionControl.cpp.
|
overridevirtual |
Stop motion, single joint.
| j | joint number |
Implements yarp::dev::IPositionControlRaw.
Definition at line 2074 of file fakeMotionControl.cpp.
|
overridevirtual |
Initialization method.
The thread executes this function when it starts and before "run". This is a good place to perform initialization tasks that need to be done by the thread itself (device drivers initialization, memory allocation etc). If the function returns false the thread quits and never calls "run". The return value of threadInit() is notified to the class and passed as a parameter to afterStart(). Note that afterStart() is called by the same thread that is executing the "start" method.
Reimplemented from yarp::os::PeriodicThread.
Definition at line 474 of file fakeMotionControl.cpp.
|
overridevirtual |
Release method.
The thread executes this function once when it exits, after the last "run". This is a good place to release resources that were initialized in threadInit() (release memory, and device driver resources).
Reimplemented from yarp::os::PeriodicThread.
Definition at line 495 of file fakeMotionControl.cpp.
|
overridevirtual |
Implements yarp::dev::IVirtualAnalogSensorRaw.
Definition at line 3206 of file fakeMotionControl.cpp.
|
overridevirtual |
Set a vector of torque values for virtual sensor.
| measure | a vector containing the sensor's last readings. |
Implements yarp::dev::IVirtualAnalogSensorRaw.
Definition at line 3197 of file fakeMotionControl.cpp.
|
overridevirtual |
Start motion at a given speed, multiple joints.
| sp | pointer to the array containing the new speed values |
Implements yarp::dev::IVelocityControlRaw.
Definition at line 1843 of file fakeMotionControl.cpp.
|
overridevirtual |
Start motion at a given speed for a subset of joints.
| n_joint | how many joints this command is referring to |
| joints | pointer to the array of joint numbers |
| spds | pointer to the array containing the new speed values |
Implements yarp::dev::IVelocityControlRaw.
Definition at line 2830 of file fakeMotionControl.cpp.
|
overridevirtual |
Start motion at a given speed, single joint.
| j | joint number |
| sp | speed value |
Implements yarp::dev::IVelocityControlRaw.
Definition at line 1827 of file fakeMotionControl.cpp.