|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
Interface for control boards implementing impedance control. More...
#include <yarp/dev/IImpedanceControl.h>
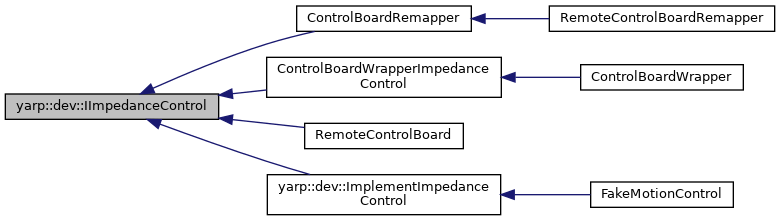
 Inheritance diagram for yarp::dev::IImpedanceControl:
Inheritance diagram for yarp::dev::IImpedanceControl:Public Member Functions | |
| virtual | ~IImpedanceControl () |
| Destructor. More... | |
| virtual bool | getAxes (int *ax)=0 |
| Get the number of controlled axes. More... | |
| virtual bool | getImpedance (int j, double *stiffness, double *damping)=0 |
| Get current impedance gains (stiffness,damping,offset) for a specific joint. More... | |
| virtual bool | setImpedance (int j, double stiffness, double damping)=0 |
| Set current impedance gains (stiffness,damping) for a specific joint. More... | |
| virtual bool | setImpedanceOffset (int j, double offset)=0 |
| Set current force Offset for a specific joint. More... | |
| virtual bool | getImpedanceOffset (int j, double *offset)=0 |
| Get current force Offset for a specific joint. More... | |
| virtual bool | getCurrentImpedanceLimit (int j, double *min_stiff, double *max_stiff, double *min_damp, double *max_damp)=0 |
| Get the current impedandance limits for a specific joint. More... | |
Interface for control boards implementing impedance control.
Definition at line 74 of file IImpedanceControl.h.
|
inlinevirtual |
Destructor.
Definition at line 80 of file IImpedanceControl.h.
|
pure virtual |
Get the number of controlled axes.
This command asks the number of controlled axes for the current physical interface.
Implemented in yarp::dev::ImplementImpedanceControl, RemoteControlBoard, FakeMotionControl, ControlBoardWrapperImpedanceControl, and ControlBoardRemapper.
|
pure virtual |
Get the current impedandance limits for a specific joint.
Implemented in yarp::dev::ImplementImpedanceControl, RemoteControlBoard, ControlBoardWrapperImpedanceControl, and ControlBoardRemapper.
|
pure virtual |
Get current impedance gains (stiffness,damping,offset) for a specific joint.
Implemented in yarp::dev::ImplementImpedanceControl, RemoteControlBoard, ControlBoardWrapperImpedanceControl, and ControlBoardRemapper.
|
pure virtual |
Get current force Offset for a specific joint.
Implemented in yarp::dev::ImplementImpedanceControl, RemoteControlBoard, ControlBoardWrapperImpedanceControl, and ControlBoardRemapper.
|
pure virtual |
Set current impedance gains (stiffness,damping) for a specific joint.
Implemented in yarp::dev::ImplementImpedanceControl, RemoteControlBoard, ControlBoardWrapperImpedanceControl, and ControlBoardRemapper.
|
pure virtual |
Set current force Offset for a specific joint.
Implemented in yarp::dev::ImplementImpedanceControl, RemoteControlBoard, ControlBoardWrapperImpedanceControl, and ControlBoardRemapper.