|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
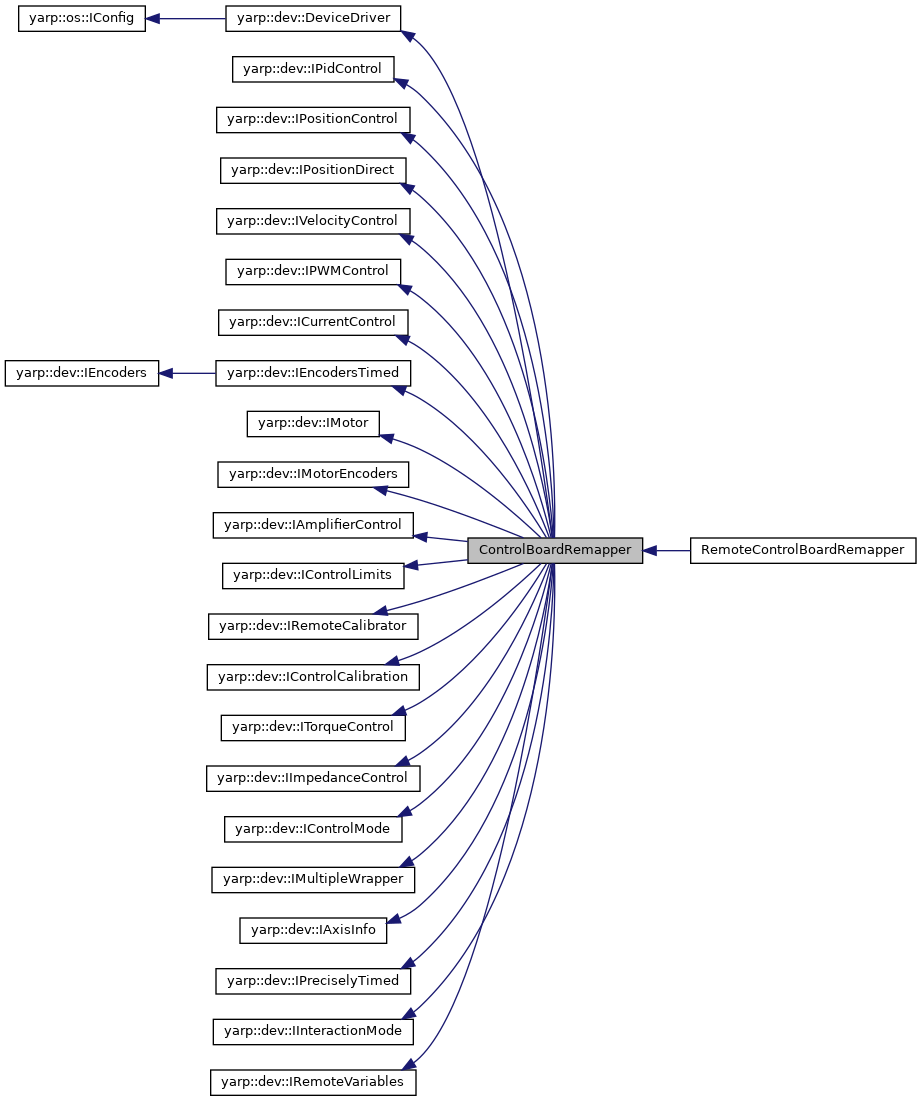
controlboardremapper : device that takes a list of axes from multiple controlboards and expose them as a single controlboard.
More...
#include <ControlBoardRemapper/ControlBoardRemapper.h>
 Inheritance diagram for ControlBoardRemapper:
Inheritance diagram for ControlBoardRemapper:Public Member Functions | |
| ControlBoardRemapper ()=default | |
| ControlBoardRemapper (const ControlBoardRemapper &)=delete | |
| ControlBoardRemapper (ControlBoardRemapper &&)=delete | |
| ControlBoardRemapper & | operator= (const ControlBoardRemapper &)=delete |
| ControlBoardRemapper & | operator= (ControlBoardRemapper &&)=delete |
| ~ControlBoardRemapper () override=default | |
| bool | verbose () const |
| Return the value of the verbose flag. More... | |
| bool | close () override |
| Close the device driver by deallocating all resources and closing ports. More... | |
| bool | open (yarp::os::Searchable &prop) override |
| Open the device driver. More... | |
| bool | detachAll () override |
| Detach the object (you must have first called attach). More... | |
| bool | attachAll (const yarp::dev::PolyDriverList &l) override |
| Attach to a list of objects. More... | |
| bool | setPid (const yarp::dev::PidControlTypeEnum &pidtype, int j, const yarp::dev::Pid &p) override |
| ControlBoard methods. More... | |
| bool | setPids (const yarp::dev::PidControlTypeEnum &pidtype, const yarp::dev::Pid *ps) override |
| Set new pid value on multiple axes. More... | |
| bool | setPidReference (const yarp::dev::PidControlTypeEnum &pidtype, int j, double ref) override |
| Set the controller reference for a given axis. More... | |
| bool | setPidReferences (const yarp::dev::PidControlTypeEnum &pidtype, const double *refs) override |
| Set the controller reference, multiple axes. More... | |
| bool | setPidErrorLimit (const yarp::dev::PidControlTypeEnum &pidtype, int j, double limit) override |
| Set the error limit for the controller on a specifi joint. More... | |
| bool | setPidErrorLimits (const yarp::dev::PidControlTypeEnum &pidtype, const double *limits) override |
| Get the error limit for the controller on all joints. More... | |
| bool | getPidError (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *err) override |
| Get the current error for a joint. More... | |
| bool | getPidErrors (const yarp::dev::PidControlTypeEnum &pidtype, double *errs) override |
| Get the error of all joints. More... | |
| bool | getPidOutput (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *out) override |
| Get the output of the controller (e.g. More... | |
| bool | getPidOutputs (const yarp::dev::PidControlTypeEnum &pidtype, double *outs) override |
| Get the output of the controllers (e.g. More... | |
| bool | setPidOffset (const yarp::dev::PidControlTypeEnum &pidtype, int j, double v) override |
| Set offset value for a given controller. More... | |
| bool | getPid (const yarp::dev::PidControlTypeEnum &pidtype, int j, yarp::dev::Pid *p) override |
| Get current pid value for a specific joint. More... | |
| bool | getPids (const yarp::dev::PidControlTypeEnum &pidtype, yarp::dev::Pid *pids) override |
| Get current pid value for a specific joint. More... | |
| bool | getPidReference (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *ref) override |
| Get the current reference of the pid controller for a specific joint. More... | |
| bool | getPidReferences (const yarp::dev::PidControlTypeEnum &pidtype, double *refs) override |
| Get the current reference of all pid controllers. More... | |
| bool | getPidErrorLimit (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *limit) override |
| Get the error limit for the controller on a specific joint. More... | |
| bool | getPidErrorLimits (const yarp::dev::PidControlTypeEnum &pidtype, double *limits) override |
| Get the error limit for all controllers. More... | |
| bool | resetPid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| Reset the controller of a given joint, usually sets the current status of the joint as the reference value for the PID, and resets the integrator. More... | |
| bool | disablePid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| Disable the pid computation for a joint. More... | |
| bool | enablePid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| Enable the pid computation for a joint. More... | |
| bool | isPidEnabled (const yarp::dev::PidControlTypeEnum &pidtype, int j, bool *enabled) override |
| Get the current status (enabled/disabled) of the pid. More... | |
| bool | getAxes (int *ax) override |
| Get the number of controlled axes. More... | |
| bool | positionMove (int j, double ref) override |
| Set new reference point for a single axis. More... | |
| bool | positionMove (const double *refs) override |
| Set new reference point for all axes. More... | |
| bool | positionMove (const int n_joints, const int *joints, const double *refs) override |
| Set new reference point for a subset of joints. More... | |
| bool | getTargetPosition (const int joint, double *ref) override |
| Get the last position reference for the specified axis. More... | |
| bool | getTargetPositions (double *refs) override |
| Get the last position reference for all axes. More... | |
| bool | getTargetPositions (const int n_joint, const int *joints, double *refs) override |
| Get the last position reference for the specified group of axes. More... | |
| bool | relativeMove (int j, double delta) override |
| Set relative position. More... | |
| bool | relativeMove (const double *deltas) override |
| Set relative position, all joints. More... | |
| bool | relativeMove (const int n_joints, const int *joints, const double *deltas) override |
| Set relative position for a subset of joints. More... | |
| bool | checkMotionDone (int j, bool *flag) override |
| Check if the current trajectory is terminated. More... | |
| bool | checkMotionDone (bool *flag) override |
| Check if the current trajectory is terminated. More... | |
| bool | checkMotionDone (const int n_joints, const int *joints, bool *flags) override |
| Check if the current trajectory is terminated. More... | |
| bool | setRefSpeed (int j, double sp) override |
| Set reference speed for a joint, this is the speed used during the interpolation of the trajectory. More... | |
| bool | setRefSpeeds (const double *spds) override |
| Set reference speed on all joints. More... | |
| bool | setRefSpeeds (const int n_joints, const int *joints, const double *spds) override |
| Set reference speed on all joints. More... | |
| bool | setRefAcceleration (int j, double acc) override |
| Set reference acceleration for a joint. More... | |
| bool | setRefAccelerations (const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | setRefAccelerations (const int n_joints, const int *joints, const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | getRefSpeed (int j, double *ref) override |
| Get reference speed for a joint. More... | |
| bool | getRefSpeeds (double *spds) override |
| Get reference speed of all joints. More... | |
| bool | getRefSpeeds (const int n_joints, const int *joints, double *spds) override |
| Get reference speed of all joints. More... | |
| bool | getRefAcceleration (int j, double *acc) override |
| Get reference acceleration for a joint. More... | |
| bool | getRefAccelerations (double *accs) override |
| Get reference acceleration of all joints. More... | |
| bool | getRefAccelerations (const int n_joints, const int *joints, double *accs) override |
| Get reference acceleration for a joint. More... | |
| bool | stop (int j) override |
| Stop motion, single joint. More... | |
| bool | stop () override |
| Stop motion, multiple joints. More... | |
| bool | stop (const int n_joints, const int *joints) override |
| Stop motion for subset of joints. More... | |
| bool | velocityMove (int j, double v) override |
| Start motion at a given speed, single joint. More... | |
| bool | velocityMove (const double *v) override |
| Start motion at a given speed, multiple joints. More... | |
| bool | resetEncoder (int j) override |
| Reset encoder, single joint. More... | |
| bool | resetEncoders () override |
| Reset encoders. More... | |
| bool | setEncoder (int j, double val) override |
| Set the value of the encoder for a given joint. More... | |
| bool | setEncoders (const double *vals) override |
| Set the value of all encoders. More... | |
| bool | getEncoder (int j, double *v) override |
| Read the value of an encoder. More... | |
| bool | getEncoders (double *encs) override |
| Read the position of all axes. More... | |
| bool | getEncodersTimed (double *encs, double *t) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getEncoderTimed (int j, double *v, double *t) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getEncoderSpeed (int j, double *sp) override |
| Read the istantaneous speed of an axis. More... | |
| bool | getEncoderSpeeds (double *spds) override |
| Read the instantaneous speed of all axes. More... | |
| bool | getEncoderAcceleration (int j, double *acc) override |
| Read the instantaneous acceleration of an axis. More... | |
| bool | getEncoderAccelerations (double *accs) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getNumberOfMotorEncoders (int *num) override |
| Get the number of available motor encoders. More... | |
| bool | resetMotorEncoder (int m) override |
| Reset motor encoder, single motor. More... | |
| bool | resetMotorEncoders () override |
| Reset motor encoders. More... | |
| bool | setMotorEncoderCountsPerRevolution (int m, const double cpr) override |
| Sets number of counts per revolution for motor encoder m. More... | |
| bool | getMotorEncoderCountsPerRevolution (int m, double *cpr) override |
| Gets number of counts per revolution for motor encoder m. More... | |
| bool | setMotorEncoder (int m, const double val) override |
| Set the value of the motor encoder for a given motor. More... | |
| bool | setMotorEncoders (const double *vals) override |
| Set the value of all motor encoders. More... | |
| bool | getMotorEncoder (int m, double *v) override |
| Read the value of a motor encoder. More... | |
| bool | getMotorEncoders (double *encs) override |
| Read the position of all motor encoders. More... | |
| bool | getMotorEncodersTimed (double *encs, double *t) override |
| Read the instantaneous position of all motor encoders. More... | |
| bool | getMotorEncoderTimed (int m, double *v, double *t) override |
| Read the instantaneous position of a motor encoder. More... | |
| bool | getMotorEncoderSpeed (int m, double *sp) override |
| Read the istantaneous speed of a motor encoder. More... | |
| bool | getMotorEncoderSpeeds (double *spds) override |
| Read the instantaneous speed of all motor encoders. More... | |
| bool | getMotorEncoderAcceleration (int m, double *acc) override |
| Read the instantaneous acceleration of a motor encoder. More... | |
| bool | getMotorEncoderAccelerations (double *accs) override |
| Read the instantaneous acceleration of all motor encoders. More... | |
| bool | enableAmp (int j) override |
| Enable the amplifier on a specific joint. More... | |
| bool | disableAmp (int j) override |
| Disable the amplifier on a specific joint. More... | |
| bool | getAmpStatus (int *st) override |
| bool | getAmpStatus (int j, int *v) override |
| bool | setMaxCurrent (int j, double v) override |
| bool | getMaxCurrent (int j, double *v) override |
| Returns the maximum electric current allowed for a given motor. More... | |
| bool | getNominalCurrent (int m, double *val) override |
| bool | setNominalCurrent (int m, const double val) override |
| bool | getPeakCurrent (int m, double *val) override |
| bool | setPeakCurrent (int m, const double val) override |
| bool | getPWM (int m, double *val) override |
| bool | getPWMLimit (int m, double *val) override |
| bool | setPWMLimit (int m, const double val) override |
| bool | getPowerSupplyVoltage (int m, double *val) override |
| bool | setLimits (int j, double min, double max) override |
| Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More... | |
| bool | getLimits (int j, double *min, double *max) override |
| Get the software limits for a particular axis. More... | |
| bool | setVelLimits (int j, double min, double max) override |
| Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More... | |
| bool | getVelLimits (int j, double *min, double *max) override |
| Get the software speed limits for a particular axis. More... | |
| bool | getRemoteVariable (std::string key, yarp::os::Bottle &val) override |
| bool | setRemoteVariable (std::string key, const yarp::os::Bottle &val) override |
| bool | getRemoteVariablesList (yarp::os::Bottle *listOfKeys) override |
| bool | isCalibratorDevicePresent (bool *isCalib) override |
| isCalibratorDevicePresent: check if a calibrator device has been set More... | |
| yarp::dev::IRemoteCalibrator * | getCalibratorDevice () override |
| getCalibratorDevice: return the pointer stored with the setCalibratorDevice More... | |
| bool | calibrateSingleJoint (int j) override |
| calibrateSingleJoint: call the calibration procedure for the single joint More... | |
| bool | calibrateWholePart () override |
| calibrateWholePart: call the procedure for calibrating the whole device More... | |
| bool | homingSingleJoint (int j) override |
| homingSingleJoint: call the homing procedure for a single joint More... | |
| bool | homingWholePart () override |
| homingWholePart: call the homing procedure for a the whole part/device More... | |
| bool | parkSingleJoint (int j, bool _wait=true) override |
| parkSingleJoint(): start the parking procedure for the single joint More... | |
| bool | parkWholePart () override |
| parkWholePart: start the parking procedure for the whole part More... | |
| bool | quitCalibrate () override |
| quitCalibrate: interrupt the calibration procedure More... | |
| bool | quitPark () override |
| quitPark: interrupt the park procedure More... | |
| bool | calibrateAxisWithParams (int j, unsigned int ui, double v1, double v2, double v3) override |
| Start calibration, this method is very often platform specific. More... | |
| bool | setCalibrationParameters (int j, const yarp::dev::CalibrationParameters ¶ms) override |
| Start calibration, this method is very often platform specific. More... | |
| bool | calibrationDone (int j) override |
| Check if the calibration is terminated, on a particular joint. More... | |
| bool | abortPark () override |
| bool | abortCalibration () override |
| bool | getNumberOfMotors (int *num) override |
| Retrieves the number of controlled axes from the current physical interface. More... | |
| bool | getTemperature (int m, double *val) override |
| Get temperature of a motor. More... | |
| bool | getTemperatures (double *vals) override |
| Get temperature of all the motors. More... | |
| bool | getTemperatureLimit (int m, double *val) override |
| Retreives the current temperature limit for a specific motor. More... | |
| bool | setTemperatureLimit (int m, const double val) override |
| Set the temperature limit for a specific motor. More... | |
| bool | getGearboxRatio (int m, double *val) override |
| Get the gearbox ratio for a specific motor. More... | |
| bool | setGearboxRatio (int m, const double val) override |
| Set the gearbox ratio for a specific motor. More... | |
| bool | getAxisName (int j, std::string &name) override |
| bool | getJointType (int j, yarp::dev::JointTypeEnum &type) override |
| bool | getRefTorques (double *refs) override |
| Get the reference value of the torque for all joints. More... | |
| bool | getRefTorque (int j, double *t) override |
| Get the reference value of the torque for a given joint. More... | |
| bool | setRefTorques (const double *t) override |
| Set the reference value of the torque for all joints. More... | |
| bool | setRefTorque (int j, double t) override |
| Set the reference value of the torque for a given joint. More... | |
| bool | setRefTorques (const int n_joint, const int *joints, const double *t) override |
| Set new torque reference for a subset of joints. More... | |
| bool | getMotorTorqueParams (int j, yarp::dev::MotorTorqueParameters *params) override |
| Get a subset of motor parameters (bemf, ktau etc) useful for torque control. More... | |
| bool | setMotorTorqueParams (int j, const yarp::dev::MotorTorqueParameters params) override |
| Set a subset of motor parameters (bemf, ktau etc) useful for torque control. More... | |
| bool | setImpedance (int j, double stiff, double damp) override |
| Set current impedance gains (stiffness,damping) for a specific joint. More... | |
| bool | setImpedanceOffset (int j, double offset) override |
| Set current force Offset for a specific joint. More... | |
| bool | getTorque (int j, double *t) override |
| Get the value of the torque on a given joint (this is the feedback if you have a torque sensor). More... | |
| bool | getTorques (double *t) override |
| Get the value of the torque for all joints (this is the feedback if you have torque sensors). More... | |
| bool | getTorqueRange (int j, double *min, double *max) override |
| Get the full scale of the torque sensor of a given joint. More... | |
| bool | getTorqueRanges (double *min, double *max) override |
| Get the full scale of the torque sensors of all joints. More... | |
| bool | getImpedance (int j, double *stiff, double *damp) override |
| Get current impedance gains (stiffness,damping,offset) for a specific joint. More... | |
| bool | getImpedanceOffset (int j, double *offset) override |
| Get current force Offset for a specific joint. More... | |
| bool | getCurrentImpedanceLimit (int j, double *min_stiff, double *max_stiff, double *min_damp, double *max_damp) override |
| Get the current impedandance limits for a specific joint. More... | |
| bool | getControlMode (int j, int *mode) override |
| Get the current control mode. More... | |
| bool | getControlModes (int *modes) override |
| Get the current control mode (multiple joints). More... | |
| bool | getControlModes (const int n_joint, const int *joints, int *modes) override |
| Get the current control mode for a subset of axes. More... | |
| bool | setControlMode (const int j, const int mode) override |
| Set the current control mode. More... | |
| bool | setControlModes (const int n_joints, const int *joints, int *modes) override |
| Set the current control mode for a subset of axes. More... | |
| bool | setControlModes (int *modes) override |
| Set the current control mode (multiple joints). More... | |
| bool | setPosition (int j, double ref) override |
| Set new position for a single axis. More... | |
| bool | setPositions (const int n_joints, const int *joints, const double *dpos) override |
| Set new reference point for all axes. More... | |
| bool | setPositions (const double *refs) override |
| Set new position for a set of axis. More... | |
| bool | getRefPosition (const int joint, double *ref) override |
| Get the last position reference for the specified axis. More... | |
| bool | getRefPositions (double *refs) override |
| Get the last position reference for all axes. More... | |
| bool | getRefPositions (const int n_joint, const int *joints, double *refs) override |
| Get the last position reference for the specified group of axes. More... | |
| yarp::os::Stamp | getLastInputStamp () override |
| Return the time stamp relative to the last acquisition. More... | |
| bool | velocityMove (const int n_joints, const int *joints, const double *spds) override |
| Start motion at a given speed for a subset of joints. More... | |
| bool | getRefVelocity (const int joint, double *vel) override |
| Get the last reference speed set by velocityMove for single joint. More... | |
| bool | getRefVelocities (double *vels) override |
| Get the last reference speed set by velocityMove for all joints. More... | |
| bool | getRefVelocities (const int n_joint, const int *joints, double *vels) override |
| Get the last reference speed set by velocityMove for a group of joints. More... | |
| bool | getInteractionMode (int j, yarp::dev::InteractionModeEnum *mode) override |
| Get the current interaction mode of the robot, values can be stiff or compliant. More... | |
| bool | getInteractionModes (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| Get the current interaction mode of the robot for a set of joints, values can be stiff or compliant. More... | |
| bool | getInteractionModes (yarp::dev::InteractionModeEnum *modes) override |
| Get the current interaction mode of the robot for a all the joints, values can be stiff or compliant. More... | |
| bool | setInteractionMode (int j, yarp::dev::InteractionModeEnum mode) override |
| Set the interaction mode of the robot, values can be stiff or compliant. More... | |
| bool | setInteractionModes (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| Set the interaction mode of the robot for a set of joints, values can be stiff or compliant. More... | |
| bool | setInteractionModes (yarp::dev::InteractionModeEnum *modes) override |
| Set the interaction mode of the robot for a all the joints, values can be stiff or compliant. More... | |
| bool | setRefDutyCycle (int m, double ref) override |
| Sets the reference dutycycle to a single motor. More... | |
| bool | setRefDutyCycles (const double *refs) override |
| Sets the reference dutycycle for all the motors. More... | |
| bool | getRefDutyCycle (int m, double *ref) override |
| Gets the last reference sent using the setRefDutyCycle function. More... | |
| bool | getRefDutyCycles (double *refs) override |
| Gets the last reference sent using the setRefDutyCycles function. More... | |
| bool | getDutyCycle (int m, double *val) override |
| Gets the current dutycycle of the output of the amplifier (i.e. More... | |
| bool | getDutyCycles (double *vals) override |
| Gets the current dutycycle of the output of the amplifier (i.e. More... | |
| bool | getCurrent (int m, double *curr) override |
| bool | getCurrents (double *currs) override |
| bool | getCurrentRange (int m, double *min, double *max) override |
| Get the full scale of the current measurement for a given motor (e.g. More... | |
| bool | getCurrentRanges (double *min, double *max) override |
| Get the full scale of the current measurements for all motors motor (e.g. More... | |
| bool | setRefCurrents (const double *currs) override |
| Set the reference value of the currents for all motors. More... | |
| bool | setRefCurrent (int m, double curr) override |
| Set the reference value of the current for a single motor. More... | |
| bool | setRefCurrents (const int n_motor, const int *motors, const double *currs) override |
| Set the reference value of the current for a group of motors. More... | |
| bool | getRefCurrents (double *currs) override |
| Get the reference value of the currents for all motors. More... | |
| bool | getRefCurrent (int m, double *curr) override |
| Get the reference value of the current for a single motor. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::IPidControl | |
| virtual | ~IPidControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IPositionControl | |
| virtual | ~IPositionControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IPositionDirect | |
| virtual | ~IPositionDirect () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IVelocityControl | |
| virtual | ~IVelocityControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IPWMControl | |
| virtual | ~IPWMControl () |
| Public Member Functions inherited from yarp::dev::ICurrentControl | |
| virtual | ~ICurrentControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IEncodersTimed | |
| virtual | ~IEncodersTimed () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IEncoders | |
| virtual | ~IEncoders () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IMotor | |
| virtual | ~IMotor () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IMotorEncoders | |
| virtual | ~IMotorEncoders () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IAmplifierControl | |
| virtual | ~IAmplifierControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IControlLimits | |
| virtual | ~IControlLimits () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IRemoteCalibrator | |
| IRemoteCalibrator () | |
| This interface is meant to remotize the access of the calibration device in order to allow users to remotely call the calibration procedure for a single joint or the whole device and let the calibrator do the job. More... | |
| virtual | ~IRemoteCalibrator ()=default |
| virtual bool | setCalibratorDevice (yarp::dev::IRemoteCalibrator *dev) |
| setCalibratorDevice: store the pointer to the calibrator device. More... | |
| virtual void | releaseCalibratorDevice () |
| releaseCalibratorDevice: reset the internal pointer to NULL when stop using the calibrator More... | |
| Public Member Functions inherited from yarp::dev::IControlCalibration | |
| IControlCalibration () | |
| virtual | ~IControlCalibration () |
| Destructor. More... | |
| virtual bool | setCalibrator (ICalibrator *c) |
| Set the calibrator object to be used to calibrate the robot. More... | |
| virtual bool | calibrateRobot () |
| Calibrate robot by using an external calibrator. More... | |
| virtual bool | park (bool wait=true) |
| Public Member Functions inherited from yarp::dev::ITorqueControl | |
| virtual | ~ITorqueControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IImpedanceControl | |
| virtual | ~IImpedanceControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IControlMode | |
| virtual | ~IControlMode () |
| Public Member Functions inherited from yarp::dev::IMultipleWrapper | |
| virtual | ~IMultipleWrapper () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IAxisInfo | |
| virtual | ~IAxisInfo () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IPreciselyTimed | |
| virtual | ~IPreciselyTimed () |
| Public Member Functions inherited from yarp::dev::IInteractionMode | |
| virtual | ~IInteractionMode () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IRemoteVariables | |
| virtual | ~IRemoteVariables () |
| Destructor. More... | |
controlboardremapper : device that takes a list of axes from multiple controlboards and expose them as a single controlboard.
| YARP device name |
|---|
controlboardremapper |
Parameters required by this device are:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| axesNames | - | vector of strings | - | - | Yes | Ordered list of the axes that are part of the remapped device. |
The axes are then mapped to the wrapped controlboard in the attachAll method, using the values returned by the getAxisName method of the controlboard. If different axes in two attached controlboard have the same name, the behaviour of this device is undefined.
Configuration file using .ini format.
For compatibility with the controlboardwrapper2, the networks keyword can also be used to select the desired joints. For more information on the syntax of the networks, see the ControlBoardWrapper class.
Definition at line 72 of file ControlBoardRemapper.h.
|
default |
|
delete |
|
delete |
|
overridedefault |
|
overridevirtual |
Reimplemented from yarp::dev::IControlCalibration.
Definition at line 3147 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IControlCalibration.
Definition at line 3141 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Attach to a list of objects.
| p | the polydriver list that you want to attach to. |
Implements yarp::dev::IMultipleWrapper.
Definition at line 236 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Start calibration, this method is very often platform specific.
Implements yarp::dev::IControlCalibration.
Definition at line 3092 of file ControlBoardRemapper.cpp.
|
overridevirtual |
calibrateSingleJoint: call the calibration procedure for the single joint
| j | joint to be calibrated |
Implements yarp::dev::IRemoteCalibrator.
Definition at line 2894 of file ControlBoardRemapper.cpp.
|
overridevirtual |
calibrateWholePart: call the procedure for calibrating the whole device
Implements yarp::dev::IRemoteCalibrator.
Definition at line 2920 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Check if the calibration is terminated, on a particular joint.
Non blocking.
Implements yarp::dev::IControlCalibration.
Definition at line 3121 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Check if the current trajectory is terminated.
Non blocking.
| flag | is a pointer to return value ("and" of all joints) |
Implements yarp::dev::IPositionControl.
Definition at line 1214 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Check if the current trajectory is terminated.
Non blocking.
| joints | pointer to the array of joint numbers |
| flag | pointer to return value (logical "and" of all set of joints) |
Implements yarp::dev::IPositionControl.
Definition at line 1246 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Check if the current trajectory is terminated.
Non blocking.
| j | is the axis number |
| flag | is a pointer to return value |
Implements yarp::dev::IPositionControl.
Definition at line 1194 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Close the device driver by deallocating all resources and closing ports.
Reimplemented from yarp::dev::DeviceDriver.
Reimplemented in RemoteControlBoardRemapper.
Definition at line 27 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Detach the object (you must have first called attach).
Implements yarp::dev::IMultipleWrapper.
Definition at line 466 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Disable the amplifier on a specific joint.
All computations within the board will be carried out normally, but the output will be disabled.
Implements yarp::dev::IAmplifierControl.
Definition at line 2546 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Disable the pid computation for a joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
Implements yarp::dev::IPidControl.
Definition at line 927 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Enable the amplifier on a specific joint.
Be careful, check that the output of the controller is appropriate (usually zero), to avoid generating abrupt movements.
Implements yarp::dev::IAmplifierControl.
Definition at line 2526 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Enable the pid computation for a joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
Implements yarp::dev::IPidControl.
Definition at line 942 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Implements yarp::dev::IAmplifierControl.
Definition at line 2551 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Implements yarp::dev::IAmplifierControl.
Definition at line 2581 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the number of controlled axes.
This command asks the number of controlled axes for the current physical interface.
Implements yarp::dev::IImpedanceControl.
Definition at line 983 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Implements yarp::dev::IAxisInfo.
Definition at line 3155 of file ControlBoardRemapper.cpp.
|
overridevirtual |
getCalibratorDevice: return the pointer stored with the setCalibratorDevice
Reimplemented from yarp::dev::IRemoteCalibrator.
Definition at line 2884 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current control mode.
| j | joint number |
| mode | a vocab of the current control mode for joint j. |
Implements yarp::dev::IControlMode.
Definition at line 3550 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current control mode for a subset of axes.
| n_joints | how many joints this command is referring to |
| joints | list of joint numbers, the size of this array is n_joints |
| modes | array containing the new controlmodes, one value for each joint, the size is n_joints. The first value will be the new reference for the joint joints[0]. for example: n_joint 3 joints 0 2 4 modes VOCAB_CM_POSITION VOCAB_CM_VELOCITY VOCAB_CM_POSITION |
Implements yarp::dev::IControlMode.
Definition at line 3594 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current control mode (multiple joints).
| modes | a vector containing vocabs for the current control modes of the joints. |
Implements yarp::dev::IControlMode.
Definition at line 3563 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Implements yarp::dev::IAmplifierControl.
Definition at line 4262 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current impedandance limits for a specific joint.
Implements yarp::dev::IImpedanceControl.
Definition at line 3530 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the full scale of the current measurement for a given motor (e.g.
-20A +20A) Reference values set by user with methods such as setRefCurrent() should be in this range. This method is not related to the current overload protection methods belonging to the iAmplifierControl interface.
| m | motor number |
| min | minimum current of the motor m |
| max | maximum current of the motor m |
Implements yarp::dev::ICurrentControl.
Definition at line 4309 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the full scale of the current measurements for all motors motor (e.g.
-20A +20A) Reference values set by user with methods such as setRefCurrent() should be in this range. This method is not related to the current overload protection methods belonging to the iAmplifierControl interface.
| min | pointer to the array that will store minimum currents |
| max | pointer to the array that will store maximum currents |
Implements yarp::dev::ICurrentControl.
Definition at line 4326 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Implements yarp::dev::IAmplifierControl.
Definition at line 4279 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Gets the current dutycycle of the output of the amplifier (i.e.
pwm value sent to the motor)
| m | motor number |
| val | pointer to storage for return value, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControl.
Definition at line 4215 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Gets the current dutycycle of the output of the amplifier (i.e.
pwm values sent to all motors)
| vals | pointer to the vector that will store the values, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControl.
Definition at line 4232 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the value of an encoder.
| j | encoder number |
| v | pointer to storage for the return value |
Implements yarp::dev::IEncoders.
Definition at line 1769 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the instantaneous acceleration of an axis.
| j | axis number |
| spds | pointer to the array that will contain the output |
Implements yarp::dev::IEncoders.
Definition at line 1916 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the instantaneous acceleration of all axes.
| accs | pointer to the array that will contain the output |
Implements yarp::dev::IEncoders.
Definition at line 1936 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the position of all axes.
| encs | pointer to the array that will contain the output |
Implements yarp::dev::IEncoders.
Definition at line 1789 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the istantaneous speed of an axis.
| j | axis number |
| sp | pointer to storage for the output |
Implements yarp::dev::IEncoders.
Definition at line 1867 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the instantaneous speed of all axes.
| spds | pointer to storage for the output values |
Implements yarp::dev::IEncoders.
Definition at line 1887 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the instantaneous acceleration of all axes.
| encs | pointer to the array that will contain the output |
| time | pointer to the array that will contain individual timestamps |
Implements yarp::dev::IEncodersTimed.
Definition at line 1818 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the instantaneous acceleration of all axes.
| j | axis index |
| encs | encoder value (pointer to) |
| time | corresponding timestamp (pointer to) |
Implements yarp::dev::IEncodersTimed.
Definition at line 1847 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the gearbox ratio for a specific motor.
| m | motor number |
| val | retrieved gearbox ratio |
Reimplemented from yarp::dev::IMotor.
Definition at line 2058 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get current impedance gains (stiffness,damping,offset) for a specific joint.
Implements yarp::dev::IImpedanceControl.
Definition at line 3490 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get current force Offset for a specific joint.
Implements yarp::dev::IImpedanceControl.
Definition at line 3510 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current interaction mode of the robot, values can be stiff or compliant.
| axis | joint number |
| mode | contains the requested information about interaction mode of the joint |
Implements yarp::dev::IInteractionMode.
Definition at line 3978 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current interaction mode of the robot for a set of joints, values can be stiff or compliant.
| n_joints | how many joints this command is referring to |
| joints | list of joints controlled. The size of this array is n_joints |
| modes | array containing the requested information about interaction mode, one value for each joint, the size is n_joints. for example: n_joint 3 joints 0 2 4 refs VOCAB_IM_STIFF VOCAB_IM_STIFF VOCAB_IM_COMPLIANT |
Implements yarp::dev::IInteractionMode.
Definition at line 3998 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current interaction mode of the robot for a all the joints, values can be stiff or compliant.
| mode | array containing the requested information about interaction mode, one value for each joint. |
Implements yarp::dev::IInteractionMode.
Definition at line 4031 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAxisInfo.
Definition at line 3175 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Return the time stamp relative to the last acquisition.
Implements yarp::dev::IPreciselyTimed.
Definition at line 3746 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the software limits for a particular axis.
| axis | joint number |
| pointer | to store the value of the lower limit |
| pointer | to store the value of the upper limit |
Implements yarp::dev::IControlLimits.
Definition at line 2823 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Returns the maximum electric current allowed for a given motor.
Exceeding this value will trigger instantaneous hardware fault.
| j | motor number |
| v | the return value |
Implements yarp::dev::IAmplifierControl.
Definition at line 2621 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the value of a motor encoder.
| m | motor encoder number |
| v | pointer to storage for the return value |
Implements yarp::dev::IMotorEncoders.
Definition at line 2327 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the instantaneous acceleration of a motor encoder.
| m | motor number |
| acc | pointer to the array that will contain the output |
Implements yarp::dev::IMotorEncoders.
Definition at line 2468 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the instantaneous acceleration of all motor encoders.
| accs | pointer to the array that will contain the output |
Implements yarp::dev::IMotorEncoders.
Definition at line 2488 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Gets number of counts per revolution for motor encoder m.
| m | motor number |
| cpr | vals pointer to the new value |
Implements yarp::dev::IMotorEncoders.
Definition at line 2307 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the position of all motor encoders.
| encs | pointer to the array that will contain the output |
Implements yarp::dev::IMotorEncoders.
Definition at line 2347 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the istantaneous speed of a motor encoder.
| m | motor number |
| sp | pointer to storage for the output |
Implements yarp::dev::IMotorEncoders.
Definition at line 2419 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the instantaneous speed of all motor encoders.
| spds | pointer to storage for the output values |
Implements yarp::dev::IMotorEncoders.
Definition at line 2439 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the instantaneous position of all motor encoders.
| encs | pointer to the array that will contain the output |
| time | pointer to the array that will contain individual timestamps |
Implements yarp::dev::IMotorEncoders.
Definition at line 2370 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Read the instantaneous position of a motor encoder.
| m | motor index |
| encs | encoder value (pointer to) |
| time | corresponding timestamp (pointer to) |
Implements yarp::dev::IMotorEncoders.
Definition at line 2399 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get a subset of motor parameters (bemf, ktau etc) useful for torque control.
| j | joint number |
| params | a struct containing the motor parameters to be retrieved |
Reimplemented from yarp::dev::ITorqueControl.
Definition at line 3311 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControl.
Definition at line 2641 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the number of available motor encoders.
| m | pointer to a value representing the number of available motor encoders. |
Implements yarp::dev::IMotorEncoders.
Definition at line 2519 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Retrieves the number of controlled axes from the current physical interface.
| ax | returns the number of controlled axes. |
Implements yarp::dev::ICurrentControl.
Definition at line 1966 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControl.
Definition at line 2661 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get current pid value for a specific joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| pid | pointer to storage for the return value. |
Implements yarp::dev::IPidControl.
Definition at line 762 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current error for a joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| err | pointer to the storage for the return value |
Implements yarp::dev::IPidControl.
Definition at line 648 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the error limit for the controller on a specific joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| limit | pointer to storage |
Implements yarp::dev::IPidControl.
Definition at line 858 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the error limit for all controllers.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| limits | pointer to the array that will store the output |
Implements yarp::dev::IPidControl.
Definition at line 877 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the error of all joints.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| errs | pointer to the vector that will store the errors |
Implements yarp::dev::IPidControl.
Definition at line 668 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the output of the controller (e.g.
pwm value)
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| out | pointer to storage for return value |
Implements yarp::dev::IPidControl.
Definition at line 696 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the output of the controllers (e.g.
pwm value)
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| outs | pinter to the vector that will store the output values |
Implements yarp::dev::IPidControl.
Definition at line 715 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current reference of the pid controller for a specific joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| ref | pointer to storage for return value |
Implements yarp::dev::IPidControl.
Definition at line 810 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current reference of all pid controllers.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| refs | vector that will store the output. |
Implements yarp::dev::IPidControl.
Definition at line 829 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get current pid value for a specific joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| pids | vector that will store the values of the pids. |
Implements yarp::dev::IPidControl.
Definition at line 781 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControl.
Definition at line 2780 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControl.
Definition at line 2721 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControl.
Definition at line 2740 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get reference acceleration for a joint.
Returns the acceleration used to generate the trajectory profile.
| j | joint number |
| acc | pointer to storage for the return value |
Implements yarp::dev::IPositionControl.
Definition at line 1485 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get reference acceleration for a joint.
Returns the acceleration used to generate the trajectory profile.
| joints | pointer to the array of joint numbers |
| accs | pointer to the array that will store the acceleration values |
Implements yarp::dev::IPositionControl.
Definition at line 1535 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get reference acceleration of all joints.
These are the values used during the interpolation of the trajectory.
| accs | pointer to the array that will store the acceleration values. |
Implements yarp::dev::IPositionControl.
Definition at line 1505 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the reference value of the current for a single motor.
| m | motor number |
| curr | the current reference value for motor m. Value is expressed in amperes. |
Implements yarp::dev::ICurrentControl.
Definition at line 4419 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the reference value of the currents for all motors.
| currs | pointer to the array to be filled with reference current values. Values are expressed in amperes. |
Implements yarp::dev::ICurrentControl.
Definition at line 4436 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Gets the last reference sent using the setRefDutyCycle function.
| m | motor number |
| ref | pointer to storage for return value, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControl.
Definition at line 4168 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Gets the last reference sent using the setRefDutyCycles function.
| refs | pointer to the vector that will store the values, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControl.
Definition at line 4185 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the last position reference for the specified axis.
This is the dual of setPositionsRaw and shall return only values sent using IPositionDirect interface. If other interfaces like IPositionControl are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionControl::PositionMove.
| ref | last reference sent using setPosition(s) functions |
Reimplemented from yarp::dev::IPositionDirect.
Definition at line 3784 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the last position reference for the specified group of axes.
This is the dual of setPositionsRaw and shall return only values sent using IPositionDirect interface. If other interfaces like IPositionControl are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionControl::PositionMove.
| ref | array containing last reference sent using setPosition(s) functions |
Reimplemented from yarp::dev::IPositionDirect.
Definition at line 3836 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the last position reference for all axes.
This is the dual of setPositionsRaw and shall return only values sent using IPositionDirect interface. If other interfaces like IPositionControl are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionControl::PositionMove.
| ref | array containing last reference sent using setPosition(s) functions |
Reimplemented from yarp::dev::IPositionDirect.
Definition at line 3805 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get reference speed for a joint.
Returns the speed used to generate the trajectory profile.
| j | joint number |
| ref | pointer to storage for the return value |
Implements yarp::dev::IPositionControl.
Definition at line 1401 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get reference speed of all joints.
These are the values used during the interpolation of the trajectory.
| joints | pointer to the array of joint numbers |
| spds | pointer to the array that will store the speed values. |
Implements yarp::dev::IPositionControl.
Definition at line 1452 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get reference speed of all joints.
These are the values used during the interpolation of the trajectory.
| spds | pointer to the array that will store the speed values. |
Implements yarp::dev::IPositionControl.
Definition at line 1421 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the reference value of the torque for a given joint.
This is NOT the feedback (see getTorque instead).
| j | joint number |
| t | the returned reference torque of joint j |
Implements yarp::dev::ITorqueControl.
Definition at line 3224 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the reference value of the torque for all joints.
This is NOT the feedback (see getTorques instead).
| t | pointer to the array of torque values |
Implements yarp::dev::ITorqueControl.
Definition at line 3195 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the last reference speed set by velocityMove for a group of joints.
| n_joint | how many joints this command is referring to |
| joints | of joints controlled. The size of this array is n_joints |
| vels | pointer to the array containing the requested values, one value for each joint. The size of the array is n_joints. |
Reimplemented from yarp::dev::IVelocityControl.
Definition at line 3945 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the last reference speed set by velocityMove for all joints.
| vels | pointer to the array containing the new speed values, one value for each joint |
Reimplemented from yarp::dev::IVelocityControl.
Definition at line 3915 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the last reference speed set by velocityMove for single joint.
| j | joint number |
| vel | returns the requested reference. |
Reimplemented from yarp::dev::IVelocityControl.
Definition at line 3893 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Implements yarp::dev::IRemoteVariables.
Definition at line 2099 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Implements yarp::dev::IRemoteVariables.
Definition at line 2166 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the last position reference for the specified axis.
This is the dual of PositionMove and shall return only values sent using IPositionControl interface. If other interfaces like IPositionDirect are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionDirect::SetPosition
| ref | last reference sent using PositionMove functions |
Reimplemented from yarp::dev::IPositionControl.
Definition at line 1049 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the last position reference for the specified group of axes.
This is the dual of PositionMove and shall return only values sent using IPositionControl interface. If other interfaces like IPositionDirect are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionDirect::SetPosition
| ref | last reference sent using PositionMove functions |
Reimplemented from yarp::dev::IPositionControl.
Definition at line 1101 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the last position reference for all axes.
This is the dual of PositionMove and shall return only values sent using IPositionControl interface. If other interfaces like IPositionDirect are implemented by the device, this call must ignore their values, i.e. this call must never return a reference sent using IPositionDirect::SetPosition
| ref | last reference sent using PositionMove functions |
Reimplemented from yarp::dev::IPositionControl.
Definition at line 1070 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get temperature of a motor.
| m | motor number |
| val | retrieved motor temperature |
Implements yarp::dev::IMotor.
Definition at line 1972 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Retreives the current temperature limit for a specific motor.
The specific behavior of the motor when the temperature limit is exceeded depends on the implementation (power off recommended)
| m | motor number |
| temp | the current temperature limit. |
Implements yarp::dev::IMotor.
Definition at line 2018 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get temperature of all the motors.
| vals | pointer to an array containing all motor temperatures |
Implements yarp::dev::IMotor.
Definition at line 1992 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the value of the torque on a given joint (this is the feedback if you have a torque sensor).
| j | joint number |
| t | pointer to the result value |
Implements yarp::dev::ITorqueControl.
Definition at line 3391 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the full scale of the torque sensor of a given joint.
| j | joint number |
| min | minimum torque of the joint j |
| max | maximum torque of the joint j |
Implements yarp::dev::ITorqueControl.
Definition at line 3441 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the full scale of the torque sensors of all joints.
| min | pointer to the array that will store minimum torques of the joints |
| max | pointer to the array that will store maximum torques of the joints |
Implements yarp::dev::ITorqueControl.
Definition at line 3461 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the value of the torque for all joints (this is the feedback if you have torque sensors).
| t | pointer to the array that will store the output |
Implements yarp::dev::ITorqueControl.
Definition at line 3411 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the software speed limits for a particular axis.
| axis | joint number |
| min | pointer to store the value of the lower limit |
| max | pointer to store the value of the upper limit |
Implements yarp::dev::IControlLimits.
Definition at line 2863 of file ControlBoardRemapper.cpp.
|
overridevirtual |
homingSingleJoint: call the homing procedure for a single joint
| j | joint to be calibrated |
Implements yarp::dev::IRemoteCalibrator.
Definition at line 2946 of file ControlBoardRemapper.cpp.
|
overridevirtual |
homingWholePart: call the homing procedure for a the whole part/device
Implements yarp::dev::IRemoteCalibrator.
Definition at line 2972 of file ControlBoardRemapper.cpp.
|
overridevirtual |
isCalibratorDevicePresent: check if a calibrator device has been set
Reimplemented from yarp::dev::IRemoteCalibrator.
Definition at line 2889 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the current status (enabled/disabled) of the pid.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| enabled | the current status of the pid controller. |
Implements yarp::dev::IPidControl.
Definition at line 962 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Open the device driver.
| prop | is a Searchable object which contains the parameters. Allowed parameters are described in the class documentation. |
Reimplemented from yarp::dev::DeviceDriver.
Reimplemented in RemoteControlBoardRemapper.
Definition at line 32 of file ControlBoardRemapper.cpp.
|
delete |
|
delete |
|
overridevirtual |
parkSingleJoint(): start the parking procedure for the single joint
Implements yarp::dev::IRemoteCalibrator.
Definition at line 2991 of file ControlBoardRemapper.cpp.
|
overridevirtual |
parkWholePart: start the parking procedure for the whole part
Implements yarp::dev::IRemoteCalibrator.
Definition at line 3017 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set new reference point for all axes.
| refs | array, new reference points. |
Implements yarp::dev::IPositionControl.
Definition at line 1009 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set new reference point for a subset of joints.
| joints | pointer to the array of joint numbers |
| refs | pointer to the array specifying the new reference points |
Implements yarp::dev::IPositionControl.
Definition at line 1029 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set new reference point for a single axis.
| j | joint number |
| ref | specifies the new ref point |
Implements yarp::dev::IPositionControl.
Definition at line 989 of file ControlBoardRemapper.cpp.
|
overridevirtual |
quitCalibrate: interrupt the calibration procedure
Implements yarp::dev::IRemoteCalibrator.
Definition at line 3038 of file ControlBoardRemapper.cpp.
|
overridevirtual |
quitPark: interrupt the park procedure
Implements yarp::dev::IRemoteCalibrator.
Definition at line 3064 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set relative position, all joints.
| deltas | pointer to the relative commands |
Implements yarp::dev::IPositionControl.
Definition at line 1154 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set relative position for a subset of joints.
| joints | pointer to the array of joint numbers |
| deltas | pointer to the array of relative commands |
Implements yarp::dev::IPositionControl.
Definition at line 1174 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set relative position.
The command is relative to the current position of the axis.
| j | joint axis number |
| delta | relative command |
Implements yarp::dev::IPositionControl.
Definition at line 1134 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reset encoder, single joint.
Set the encoder value to zero
| j | encoder number |
Implements yarp::dev::IEncoders.
Definition at line 1673 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reset encoders.
Set the encoders value to zero
Implements yarp::dev::IEncoders.
Definition at line 1692 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reset motor encoder, single motor.
Set the encoder value to zero.
| m | motor number |
Implements yarp::dev::IMotorEncoders.
Definition at line 2188 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reset motor encoders.
Set the motor encoders value to zero.
Implements yarp::dev::IMotorEncoders.
Definition at line 2208 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reset the controller of a given joint, usually sets the current status of the joint as the reference value for the PID, and resets the integrator.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
Implements yarp::dev::IPidControl.
Definition at line 907 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Start calibration, this method is very often platform specific.
Reimplemented from yarp::dev::IControlCalibration.
Definition at line 3106 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the current control mode.
| j | joint number |
| mode | a vocab of the desired control mode for joint j. |
Implements yarp::dev::IControlMode.
Definition at line 3627 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the current control mode for a subset of axes.
| n_joints | how many joints this command is referring to |
| joints | list of joint numbers, the size of this array is n_joints |
| modes | array containing the new controlmodes, one value for each joint, the size is n_joints. The first value will be the new reference for the joint joints[0]. for example: n_joint 3 joints 0 2 4 modes VOCAB_CM_POSITION VOCAB_CM_VELOCITY VOCAB_CM_POSITION |
Implements yarp::dev::IControlMode.
Definition at line 3646 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the current control mode (multiple joints).
| modes | a vector containing vocabs for the desired control modes of the joints. |
Implements yarp::dev::IControlMode.
Definition at line 3666 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the value of the encoder for a given joint.
| j | encoder number |
| val | new value |
Implements yarp::dev::IEncoders.
Definition at line 1720 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the value of all encoders.
| vals | pointer to the new values |
Implements yarp::dev::IEncoders.
Definition at line 1740 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the gearbox ratio for a specific motor.
| m | motor number |
| gearbox | ratio to be set |
Reimplemented from yarp::dev::IMotor.
Definition at line 2078 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set current impedance gains (stiffness,damping) for a specific joint.
Implements yarp::dev::IImpedanceControl.
Definition at line 3351 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set current force Offset for a specific joint.
Implements yarp::dev::IImpedanceControl.
Definition at line 3371 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the interaction mode of the robot, values can be stiff or compliant.
Please note that some robot may not implement certain types of interaction, so always check the return value.
| axis | joint number |
| mode | the desired interaction mode |
Implements yarp::dev::IInteractionMode.
Definition at line 4061 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the interaction mode of the robot for a set of joints, values can be stiff or compliant.
Please note that some robot may not implement certain types of interaction, so always check the return value.
| n_joints | how many joints this command is referring to |
| joints | list of joints controlled. The size of this array is n_joints |
| modes | array containing the desired interaction mode, one value for each joint, the size is n_joints. for example: n_joint 3 joints 0 2 4 refs VOCAB_IM_STIFF VOCAB_IM_STIFF VOCAB_IM_COMPLIANT |
Implements yarp::dev::IInteractionMode.
Definition at line 4081 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the interaction mode of the robot for a all the joints, values can be stiff or compliant.
Some robot may not implement some types of interaction, so always check the return value
| mode | array with the desired interaction mode for all joints, length is the total number of joints for the part |
Implements yarp::dev::IInteractionMode.
Definition at line 4101 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation.
| axis | joint number (why am I telling you this) |
| min | the value of the lower limit |
| max | the value of the upper limit |
Implements yarp::dev::IControlLimits.
Definition at line 2803 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Implements yarp::dev::IAmplifierControl.
Definition at line 2601 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the value of the motor encoder for a given motor.
| m | motor number |
| val | new value |
Implements yarp::dev::IMotorEncoders.
Definition at line 2237 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Sets number of counts per revolution for motor encoder m.
| m | motor number |
| cpr | new value |
Implements yarp::dev::IMotorEncoders.
Definition at line 2287 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the value of all motor encoders.
| vals | pointer to the new values |
Implements yarp::dev::IMotorEncoders.
Definition at line 2257 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set a subset of motor parameters (bemf, ktau etc) useful for torque control.
| j | joint number |
| params | a struct containing the motor parameters to be set |
Reimplemented from yarp::dev::ITorqueControl.
Definition at line 3331 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControl.
Definition at line 2701 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControl.
Definition at line 2681 of file ControlBoardRemapper.cpp.
|
overridevirtual |
ControlBoard methods.
Implements yarp::dev::IPidControl.
Definition at line 503 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the error limit for the controller on a specifi joint.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| limit | limit value |
Implements yarp::dev::IPidControl.
Definition at line 600 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Get the error limit for the controller on all joints.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| limits | pointer to the vector with the new limits |
Implements yarp::dev::IPidControl.
Definition at line 619 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set offset value for a given controller.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| v | the offset to be added to the output of the pid controller |
Implements yarp::dev::IPidControl.
Definition at line 743 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the controller reference for a given axis.
Warning this method can result in very large torques and should be used carefully. If you do not understand this warning you should avoid using this method. Have a look at other interfaces (e.g. position control).
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| j | joint number |
| ref | new reference point |
Implements yarp::dev::IPidControl.
Definition at line 551 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the controller reference, multiple axes.
Warning this method can result in very large torques and should be used carefully. If you do not understand this warning you should avoid using this method. Have a look at other interfaces (e.g. position control).
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| refs | pointer to the vector that contains the new reference points. |
Implements yarp::dev::IPidControl.
Definition at line 571 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set new pid value on multiple axes.
| pidtype | the id of the pid that will be affected by the command (e.g. position, velocity etc) |
| pids | pointer to a vector of pids |
Implements yarp::dev::IPidControl.
Definition at line 522 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set new position for a single axis.
| j | joint number |
| ref | specifies the new ref point |
Implements yarp::dev::IPositionDirect.
Definition at line 3686 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set new position for a set of axis.
| refs | specifies the new reference points |
Implements yarp::dev::IPositionDirect.
Definition at line 3726 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set new reference point for all axes.
| n_joint | how many joints this command is referring to |
| joints | list of joints controlled. The size of this array is n_joints |
| refs | array, new reference points, one value for each joint, the size is n_joints. The first value will be the new reference for the joint joints[0]. for example: n_joint 3 joints 0 2 4 refs 10 30 40 |
Implements yarp::dev::IPositionDirect.
Definition at line 3706 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAmplifierControl.
Definition at line 2760 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set reference acceleration for a joint.
This value is used during the trajectory generation.
| j | joint number |
| acc | acceleration value |
Implements yarp::dev::IPositionControl.
Definition at line 1341 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set reference acceleration on all joints.
This is the valure that is used during the generation of the trajectory.
| accs | pointer to the array of acceleration values |
Implements yarp::dev::IPositionControl.
Definition at line 1361 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set reference acceleration on all joints.
This is the valure that is used during the generation of the trajectory.
| joints | pointer to the array of joint numbers |
| accs | pointer to the array with acceleration values |
Implements yarp::dev::IPositionControl.
Definition at line 1381 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the reference value of the current for a single motor.
| m | motor number |
| curr | the current reference value for motor m. Value is expressed in amperes. |
Implements yarp::dev::ICurrentControl.
Definition at line 4356 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the reference value of the currents for all motors.
| currs | the array containing the reference current values. Values are expressed in amperes. |
Implements yarp::dev::ICurrentControl.
Definition at line 4399 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the reference value of the current for a group of motors.
| n_motor | size of motors ans currs arrays |
| motors | pointer to the array containing the list of motor numbers |
| currs | pointer to the array specifying the new current references |
Implements yarp::dev::ICurrentControl.
Definition at line 4373 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Sets the reference dutycycle to a single motor.
| m | motor number |
| ref | the dutycycle, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControl.
Definition at line 4121 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Sets the reference dutycycle for all the motors.
| refs | the dutycycle, expressed as percentage (-100% +100%) |
Implements yarp::dev::IPWMControl.
Definition at line 4138 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set reference speed for a joint, this is the speed used during the interpolation of the trajectory.
| j | joint number |
| sp | speed value |
Implements yarp::dev::IPositionControl.
Definition at line 1281 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set reference speed on all joints.
These values are used during the interpolation of the trajectory.
| spds | pointer to the array of speed values. |
Implements yarp::dev::IPositionControl.
Definition at line 1301 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set reference speed on all joints.
These values are used during the interpolation of the trajectory.
| joints | pointer to the array of joint numbers |
| spds | pointer to the array with speed values. |
Implements yarp::dev::IPositionControl.
Definition at line 1321 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the reference value of the torque for a given joint.
| j | joint number |
| t | new value |
Implements yarp::dev::ITorqueControl.
Definition at line 3273 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the reference value of the torque for all joints.
| t | pointer to the array of torque values |
Implements yarp::dev::ITorqueControl.
Definition at line 3243 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set new torque reference for a subset of joints.
| joints | pointer to the array of joint numbers |
| refs | pointer to the array specifying the new torque reference |
Reimplemented from yarp::dev::ITorqueControl.
Definition at line 3291 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Implements yarp::dev::IRemoteVariables.
Definition at line 2133 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the temperature limit for a specific motor.
The specific behavior of the motor when the temperature limit is exceeded depends on the implementation (power off recommended)
| m | motor number |
| temp | the temperature limit to be set |
Implements yarp::dev::IMotor.
Definition at line 2038 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation.
| axis | joint number |
| min | the value of the lower limit |
| max | the value of the upper limit |
Implements yarp::dev::IControlLimits.
Definition at line 2843 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Stop motion, multiple joints.
Implements yarp::dev::IPositionControl.
Definition at line 1588 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Stop motion for subset of joints.
| joints | pointer to the array of joint numbers |
Implements yarp::dev::IPositionControl.
Definition at line 1608 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Stop motion, single joint.
| j | joint number |
Implements yarp::dev::IPositionControl.
Definition at line 1568 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Start motion at a given speed, multiple joints.
| sp | pointer to the array containing the new speed values |
Implements yarp::dev::IVelocityControl.
Definition at line 1652 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Start motion at a given speed for a subset of joints.
| n_joint | how many joints this command is referring to |
| joints | of joints controlled. The size of this array is n_joints |
| spds | pointer to the array containing the new speed values, one value for each joint, the size of the array is n_joints. The first value will be the new reference for the joint joints[0]. for example: n_joint 3 joints 0 2 4 spds 10 30 40 |
Implements yarp::dev::IVelocityControl.
Definition at line 3873 of file ControlBoardRemapper.cpp.
|
overridevirtual |
Start motion at a given speed, single joint.
| j | joint number |
| sp | speed value |
Implements yarp::dev::IVelocityControl.
Definition at line 1632 of file ControlBoardRemapper.cpp.
|
inline |
Return the value of the verbose flag.
Definition at line 188 of file ControlBoardRemapper.h.