|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
Interface for control devices, commands to get/set position and veloity limits. More...
#include <yarp/dev/IControlLimits.h>
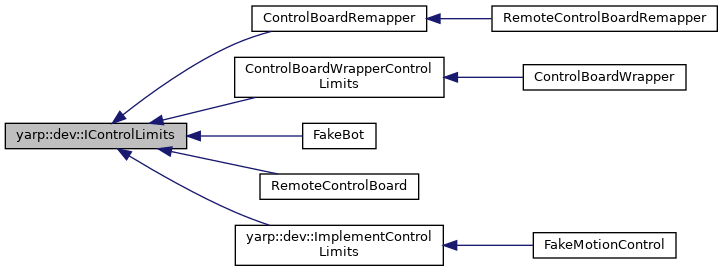
 Inheritance diagram for yarp::dev::IControlLimits:
Inheritance diagram for yarp::dev::IControlLimits:Public Member Functions | |
| virtual | ~IControlLimits () |
| Destructor. More... | |
| virtual bool | setLimits (int axis, double min, double max)=0 |
| Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More... | |
| virtual bool | getLimits (int axis, double *min, double *max)=0 |
| Get the software limits for a particular axis. More... | |
| virtual bool | setVelLimits (int axis, double min, double max)=0 |
| Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More... | |
| virtual bool | getVelLimits (int axis, double *min, double *max)=0 |
| Get the software speed limits for a particular axis. More... | |
Interface for control devices, commands to get/set position and veloity limits.
Definition at line 32 of file IControlLimits.h.
|
inlinevirtual |
Destructor.
Definition at line 38 of file IControlLimits.h.
|
pure virtual |
Get the software limits for a particular axis.
| axis | joint number |
| pointer | to store the value of the lower limit |
| pointer | to store the value of the upper limit |
Implemented in ControlBoardWrapperControlLimits, ControlBoardRemapper, yarp::dev::ImplementControlLimits, RemoteControlBoard, and FakeBot.
|
pure virtual |
Get the software speed limits for a particular axis.
| axis | joint number |
| min | pointer to store the value of the lower limit |
| max | pointer to store the value of the upper limit |
Implemented in ControlBoardWrapperControlLimits, ControlBoardRemapper, yarp::dev::ImplementControlLimits, RemoteControlBoard, and FakeBot.
|
pure virtual |
Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation.
| axis | joint number (why am I telling you this) |
| min | the value of the lower limit |
| max | the value of the upper limit |
Implemented in ControlBoardWrapperControlLimits, ControlBoardRemapper, yarp::dev::ImplementControlLimits, RemoteControlBoard, and FakeBot.
|
pure virtual |
Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation.
| axis | joint number |
| min | the value of the lower limit |
| max | the value of the upper limit |
Implemented in ControlBoardWrapperControlLimits, ControlBoardRemapper, yarp::dev::ImplementControlLimits, RemoteControlBoard, and FakeBot.