Interface for setting control mode in control board.
More...
#include <yarp/dev/IControlMode.h>
Interface for setting control mode in control board.
Definition at line 27 of file IControlMode.h.
◆ ~IControlMode()
| virtual yarp::dev::IControlMode::~IControlMode |
( |
| ) |
|
|
inlinevirtual |
◆ getControlMode()
| virtual bool yarp::dev::IControlMode::getControlMode |
( |
int |
j, |
|
|
int * |
mode |
|
) |
| |
|
pure virtual |
◆ getControlModes() [1/2]
| virtual bool yarp::dev::IControlMode::getControlModes |
( |
const int |
n_joint, |
|
|
const int * |
joints, |
|
|
int * |
modes |
|
) |
| |
|
pure virtual |
Get the current control mode for a subset of axes.
- Parameters
-
| n_joints | how many joints this command is referring to |
| joints | list of joint numbers, the size of this array is n_joints |
| modes | array containing the new controlmodes, one value for each joint, the size is n_joints. The first value will be the new reference for the joint joints[0]. for example: n_joint 3 joints 0 2 4 modes VOCAB_CM_POSITION VOCAB_CM_VELOCITY VOCAB_CM_POSITION |
- Returns
- true/false success failure.
Implemented in yarp::dev::ImplementControlMode, RemoteControlBoard, ControlBoardWrapperControlMode, and ControlBoardRemapper.
◆ getControlModes() [2/2]
| virtual bool yarp::dev::IControlMode::getControlModes |
( |
int * |
modes | ) |
|
|
pure virtual |
◆ setControlMode()
| virtual bool yarp::dev::IControlMode::setControlMode |
( |
const int |
j, |
|
|
const int |
mode |
|
) |
| |
|
pure virtual |
◆ setControlModes() [1/2]
| virtual bool yarp::dev::IControlMode::setControlModes |
( |
const int |
n_joint, |
|
|
const int * |
joints, |
|
|
int * |
modes |
|
) |
| |
|
pure virtual |
Set the current control mode for a subset of axes.
- Parameters
-
| n_joints | how many joints this command is referring to |
| joints | list of joint numbers, the size of this array is n_joints |
| modes | array containing the new controlmodes, one value for each joint, the size is n_joints. The first value will be the new reference for the joint joints[0]. for example: n_joint 3 joints 0 2 4 modes VOCAB_CM_POSITION VOCAB_CM_VELOCITY VOCAB_CM_POSITION |
- Returns
- true if the new controlMode was successfully set, false if the message was not received or the joint was unable to switch to the desired controlMode (e.g. the joint is on a fault condition or the desired mode is not implemented).
Implemented in ControlBoardWrapperControlMode, ControlBoardRemapper, yarp::dev::ImplementControlMode, and RemoteControlBoard.
◆ setControlModes() [2/2]
| virtual bool yarp::dev::IControlMode::setControlModes |
( |
int * |
modes | ) |
|
|
pure virtual |
Set the current control mode (multiple joints).
- Parameters
-
| modes | a vector containing vocabs for the desired control modes of the joints. |
- Returns
- true if the new controlMode was successfully set, false if the message was not received or the joint was unable to switch to the desired controlMode (e.g. the joint is on a fault condition or the desired mode is not implemented).
Implemented in yarp::dev::ImplementControlMode, RemoteControlBoard, ControlBoardWrapperControlMode, and ControlBoardRemapper.
The documentation for this class was generated from the following file:



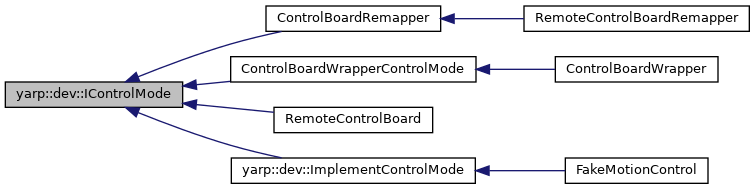
 Inheritance diagram for yarp::dev::IControlMode:
Inheritance diagram for yarp::dev::IControlMode: