|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
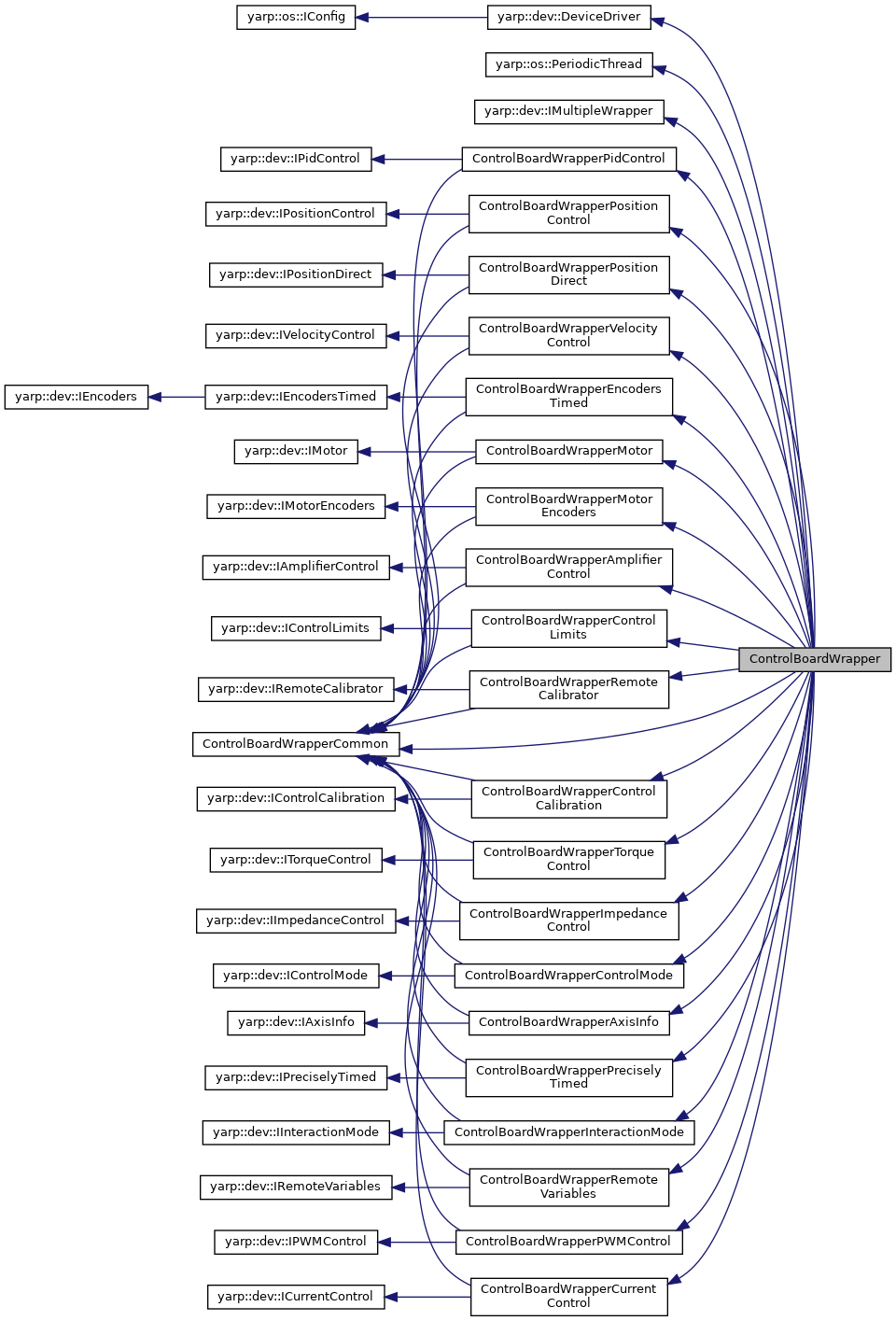
controlboardwrapper2: An updated version of the controlBoard network wrapper.
More...
#include <ControlBoardWrapper/ControlBoardWrapper.h>
 Inheritance diagram for ControlBoardWrapper:
Inheritance diagram for ControlBoardWrapper:Public Member Functions | |
| ControlBoardWrapper () | |
| ControlBoardWrapper (const ControlBoardWrapper &)=delete | |
| ControlBoardWrapper (ControlBoardWrapper &&)=delete | |
| ControlBoardWrapper & | operator= (const ControlBoardWrapper &)=delete |
| ControlBoardWrapper & | operator= (ControlBoardWrapper &&)=delete |
| ~ControlBoardWrapper () override | |
| std::string | getId () |
| bool | close () override |
| Close the device driver by deallocating all resources and closing ports. More... | |
| bool | open (yarp::os::Searchable &prop) override |
| Open the device driver. More... | |
| bool | detachAll () override |
| Detach the object (you must have first called attach). More... | |
| bool | attachAll (const yarp::dev::PolyDriverList &l) override |
| Attach to a list of objects. More... | |
| void | run () override |
| The thread main loop deals with writing on ports here. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::os::PeriodicThread | |
| PeriodicThread (double period, ShouldUseSystemClock useSystemClock=ShouldUseSystemClock::No) | |
| Constructor. More... | |
| virtual | ~PeriodicThread () |
| bool | start () |
| Call this to start the thread. More... | |
| void | step () |
| Call this to "step" the thread rather than starting it. More... | |
| void | stop () |
| Call this to stop the thread, this call blocks until the thread is terminated (and releaseThread() called). More... | |
| void | askToStop () |
| Stop the thread. More... | |
| bool | isRunning () const |
| Returns true when the thread is started, false otherwise. More... | |
| bool | isSuspended () const |
| Returns true when the thread is suspended, false otherwise. More... | |
| bool | setPeriod (double period) |
| Set the (new) period of the thread. More... | |
| double | getPeriod () const |
| Return the current period of the thread. More... | |
| void | suspend () |
| Suspend the thread, the thread keeps running by doLoop is never executed. More... | |
| void | resume () |
| Resume the thread if previously suspended. More... | |
| void | resetStat () |
| Reset thread statistics. More... | |
| double | getEstimatedPeriod () const |
| Return estimated period since last reset. More... | |
| void | getEstimatedPeriod (double &av, double &std) const |
| Return estimated period since last reset. More... | |
| unsigned int | getIterations () const |
| Return the number of iterations performed since last reset. More... | |
| double | getEstimatedUsed () const |
| Return the estimated duration of the run() function since last reset. More... | |
| void | getEstimatedUsed (double &av, double &std) const |
| Return estimated duration of the run() function since last reset. More... | |
| int | setPriority (int priority, int policy=-1) |
| Set the priority and scheduling policy of the thread, if the OS supports that. More... | |
| int | getPriority () const |
| Query the current priority of the thread, if the OS supports that. More... | |
| int | getPolicy () const |
| Query the current scheduling policy of the thread, if the OS supports that. More... | |
| Public Member Functions inherited from yarp::dev::IMultipleWrapper | |
| virtual | ~IMultipleWrapper () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperCommon | |
| bool | getAxes (int *ax) |
| bool | setRefAcceleration (int j, double acc) |
| bool | setRefAccelerations (const double *accs) |
| bool | setRefAccelerations (const int n_joints, const int *joints, const double *accs) |
| bool | getRefAcceleration (int j, double *acc) |
| bool | getRefAccelerations (double *accs) |
| bool | getRefAccelerations (const int n_joints, const int *joints, double *accs) |
| bool | stop (int j) |
| bool | stop () |
| bool | stop (const int n_joint, const int *joints) |
| bool | getNumberOfMotors (int *num) |
| bool | getCurrent (int m, double *curr) |
| bool | getCurrents (double *currs) |
| void | printError (const std::string &func_name, const std::string &info, bool result) |
| Public Member Functions inherited from ControlBoardWrapperPidControl | |
| bool | setPid (const yarp::dev::PidControlTypeEnum &pidtype, int j, const yarp::dev::Pid &p) override |
| Set new pid value for a joint axis. More... | |
| bool | setPids (const yarp::dev::PidControlTypeEnum &pidtype, const yarp::dev::Pid *ps) override |
| Set new pid value on multiple axes. More... | |
| bool | setPidReference (const yarp::dev::PidControlTypeEnum &pidtype, int j, double ref) override |
| Set the controller reference for a given axis. More... | |
| bool | setPidReferences (const yarp::dev::PidControlTypeEnum &pidtype, const double *refs) override |
| Set the controller reference, multiple axes. More... | |
| bool | setPidErrorLimit (const yarp::dev::PidControlTypeEnum &pidtype, int j, double limit) override |
| Set the error limit for the controller on a specifi joint. More... | |
| bool | setPidErrorLimits (const yarp::dev::PidControlTypeEnum &pidtype, const double *limits) override |
| Get the error limit for the controller on all joints. More... | |
| bool | getPidError (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *err) override |
| Get the current error for a joint. More... | |
| bool | getPidErrors (const yarp::dev::PidControlTypeEnum &pidtype, double *errs) override |
| Get the error of all joints. More... | |
| bool | getPidOutput (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *out) override |
| Get the output of the controller (e.g. More... | |
| bool | getPidOutputs (const yarp::dev::PidControlTypeEnum &pidtype, double *outs) override |
| Get the output of the controllers (e.g. More... | |
| bool | setPidOffset (const yarp::dev::PidControlTypeEnum &pidtype, int j, double v) override |
| Set offset value for a given controller. More... | |
| bool | getPid (const yarp::dev::PidControlTypeEnum &pidtype, int j, yarp::dev::Pid *p) override |
| Get current pid value for a specific joint. More... | |
| bool | getPids (const yarp::dev::PidControlTypeEnum &pidtype, yarp::dev::Pid *pids) override |
| Get current pid value for a specific joint. More... | |
| bool | getPidReference (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *ref) override |
| Get the current reference of the pid controller for a specific joint. More... | |
| bool | getPidReferences (const yarp::dev::PidControlTypeEnum &pidtype, double *refs) override |
| Get the current reference of all pid controllers. More... | |
| bool | getPidErrorLimit (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *limit) override |
| Get the error limit for the controller on a specific joint. More... | |
| bool | getPidErrorLimits (const yarp::dev::PidControlTypeEnum &pidtype, double *limits) override |
| Get the error limit for all controllers. More... | |
| bool | resetPid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| Reset the controller of a given joint, usually sets the current status of the joint as the reference value for the PID, and resets the integrator. More... | |
| bool | disablePid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| Disable the pid computation for a joint. More... | |
| bool | enablePid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| Enable the pid computation for a joint. More... | |
| bool | isPidEnabled (const yarp::dev::PidControlTypeEnum &pidtype, int j, bool *enabled) override |
| Get the current status (enabled/disabled) of the pid. More... | |
| Public Member Functions inherited from yarp::dev::IPidControl | |
| virtual | ~IPidControl () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperPositionControl | |
| bool | getAxes (int *ax) override |
| Get the number of controlled axes. More... | |
| bool | positionMove (int j, double ref) override |
| Set new reference point for a single axis. More... | |
| bool | positionMove (const double *refs) override |
| Set new reference point for all axes. More... | |
| bool | positionMove (const int n_joints, const int *joints, const double *refs) override |
| Set new reference point for a subset of joints. More... | |
| bool | getTargetPosition (const int joint, double *ref) override |
| Get the last position reference for the specified axis. More... | |
| bool | getTargetPositions (double *refs) override |
| Get the last position reference for all axes. More... | |
| bool | getTargetPositions (const int n_joint, const int *joints, double *refs) override |
| Get the last position reference for the specified group of axes. More... | |
| bool | relativeMove (int j, double delta) override |
| Set relative position. More... | |
| bool | relativeMove (const double *deltas) override |
| Set relative position, all joints. More... | |
| bool | relativeMove (const int n_joints, const int *joints, const double *deltas) override |
| Set relative position for a subset of joints. More... | |
| bool | checkMotionDone (int j, bool *flag) override |
| Check if the current trajectory is terminated. More... | |
| bool | checkMotionDone (bool *flag) override |
| Check if the current trajectory is terminated. More... | |
| bool | checkMotionDone (const int n_joints, const int *joints, bool *flags) override |
| Check if the current trajectory is terminated. More... | |
| bool | setRefSpeed (int j, double sp) override |
| Set reference speed for a joint, this is the speed used during the interpolation of the trajectory. More... | |
| bool | setRefSpeeds (const double *spds) override |
| Set reference speed on all joints. More... | |
| bool | setRefSpeeds (const int n_joints, const int *joints, const double *spds) override |
| Set reference speed on all joints. More... | |
| bool | setRefAcceleration (int j, double acc) override |
| Set reference acceleration for a joint. More... | |
| bool | setRefAccelerations (const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | setRefAccelerations (const int n_joints, const int *joints, const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | getRefSpeed (int j, double *ref) override |
| Get reference speed for a joint. More... | |
| bool | getRefSpeeds (double *spds) override |
| Get reference speed of all joints. More... | |
| bool | getRefSpeeds (const int n_joints, const int *joints, double *spds) override |
| Get reference speed of all joints. More... | |
| bool | getRefAcceleration (int j, double *acc) override |
| Get reference acceleration for a joint. More... | |
| bool | getRefAccelerations (double *accs) override |
| Get reference acceleration of all joints. More... | |
| bool | getRefAccelerations (const int n_joints, const int *joints, double *accs) override |
| Get reference acceleration for a joint. More... | |
| bool | stop (int j) override |
| Stop motion, single joint. More... | |
| bool | stop () override |
| Stop motion, multiple joints. More... | |
| bool | stop (const int n_joints, const int *joints) override |
| Stop motion for subset of joints. More... | |
| Public Member Functions inherited from yarp::dev::IPositionControl | |
| virtual | ~IPositionControl () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperPositionDirect | |
| bool | getAxes (int *ax) override |
| Get the number of controlled axes. More... | |
| bool | setPosition (int j, double ref) override |
| Set new position for a single axis. More... | |
| bool | setPositions (const int n_joints, const int *joints, const double *dpos) override |
| Set new reference point for all axes. More... | |
| bool | setPositions (const double *refs) override |
| Set new position for a set of axis. More... | |
| bool | getRefPosition (const int joint, double *ref) override |
| Get the last position reference for the specified axis. More... | |
| bool | getRefPositions (double *refs) override |
| Get the last position reference for all axes. More... | |
| bool | getRefPositions (const int n_joint, const int *joints, double *refs) override |
| Get the last position reference for the specified group of axes. More... | |
| Public Member Functions inherited from yarp::dev::IPositionDirect | |
| virtual | ~IPositionDirect () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperVelocityControl | |
| bool | getAxes (int *ax) override |
| Get the number of controlled axes. More... | |
| bool | velocityMove (int j, double v) override |
| Start motion at a given speed, single joint. More... | |
| bool | velocityMove (const double *v) override |
| Start motion at a given speed, multiple joints. More... | |
| bool | velocityMove (const int n_joints, const int *joints, const double *spds) override |
| Start motion at a given speed for a subset of joints. More... | |
| bool | getRefVelocity (const int joint, double *vel) override |
| Get the last reference speed set by velocityMove for single joint. More... | |
| bool | getRefVelocities (double *vels) override |
| Get the last reference speed set by velocityMove for all joints. More... | |
| bool | getRefVelocities (const int n_joint, const int *joints, double *vels) override |
| Get the last reference speed set by velocityMove for a group of joints. More... | |
| bool | setRefAcceleration (int j, double acc) override |
| Set reference acceleration for a joint. More... | |
| bool | setRefAccelerations (const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | setRefAccelerations (const int n_joints, const int *joints, const double *accs) override |
| Set reference acceleration for a subset of joints. More... | |
| bool | getRefAcceleration (int j, double *acc) override |
| Get reference acceleration for a joint. More... | |
| bool | getRefAccelerations (double *accs) override |
| Get reference acceleration of all joints. More... | |
| bool | getRefAccelerations (const int n_joints, const int *joints, double *accs) override |
| Get reference acceleration for a subset of joints. More... | |
| bool | stop (int j) override |
| Stop motion, single joint. More... | |
| bool | stop () override |
| Stop motion, multiple joints. More... | |
| bool | stop (const int n_joint, const int *joints) override |
| Stop motion for a subset of joints. More... | |
| Public Member Functions inherited from yarp::dev::IVelocityControl | |
| virtual | ~IVelocityControl () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperEncodersTimed | |
| bool | getAxes (int *ax) override |
| Get the number of controlled axes. More... | |
| bool | resetEncoder (int j) override |
| Reset encoder, single joint. More... | |
| bool | resetEncoders () override |
| Reset encoders. More... | |
| bool | setEncoder (int j, double val) override |
| Set the value of the encoder for a given joint. More... | |
| bool | setEncoders (const double *vals) override |
| Set the value of all encoders. More... | |
| bool | getEncoder (int j, double *v) override |
| Read the value of an encoder. More... | |
| bool | getEncoders (double *encs) override |
| Read the position of all axes. More... | |
| bool | getEncoderSpeed (int j, double *sp) override |
| Read the istantaneous speed of an axis. More... | |
| bool | getEncoderSpeeds (double *spds) override |
| Read the instantaneous speed of all axes. More... | |
| bool | getEncoderAcceleration (int j, double *acc) override |
| Read the instantaneous acceleration of an axis. More... | |
| bool | getEncoderAccelerations (double *accs) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getEncodersTimed (double *encs, double *t) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getEncoderTimed (int j, double *v, double *t) override |
| Read the instantaneous acceleration of all axes. More... | |
| Public Member Functions inherited from yarp::dev::IEncodersTimed | |
| virtual | ~IEncodersTimed () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IEncoders | |
| virtual | ~IEncoders () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperMotor | |
| bool | getNumberOfMotors (int *num) override |
| Get the number of available motors. More... | |
| bool | getTemperature (int m, double *val) override |
| Get temperature of a motor. More... | |
| bool | getTemperatures (double *vals) override |
| Get temperature of all the motors. More... | |
| bool | getTemperatureLimit (int m, double *val) override |
| Retreives the current temperature limit for a specific motor. More... | |
| bool | setTemperatureLimit (int m, const double val) override |
| Set the temperature limit for a specific motor. More... | |
| bool | getGearboxRatio (int m, double *val) override |
| Get the gearbox ratio for a specific motor. More... | |
| bool | setGearboxRatio (int m, const double val) override |
| Set the gearbox ratio for a specific motor. More... | |
| Public Member Functions inherited from yarp::dev::IMotor | |
| virtual | ~IMotor () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperMotorEncoders | |
| bool | getNumberOfMotorEncoders (int *num) override |
| Get the number of available motor encoders. More... | |
| bool | resetMotorEncoder (int m) override |
| Reset motor encoder, single motor. More... | |
| bool | resetMotorEncoders () override |
| Reset motor encoders. More... | |
| bool | setMotorEncoderCountsPerRevolution (int m, const double cpr) override |
| Sets number of counts per revolution for motor encoder m. More... | |
| bool | getMotorEncoderCountsPerRevolution (int m, double *cpr) override |
| Gets number of counts per revolution for motor encoder m. More... | |
| bool | setMotorEncoder (int m, const double val) override |
| Set the value of the motor encoder for a given motor. More... | |
| bool | setMotorEncoders (const double *vals) override |
| Set the value of all motor encoders. More... | |
| bool | getMotorEncoder (int m, double *v) override |
| Read the value of a motor encoder. More... | |
| bool | getMotorEncoders (double *encs) override |
| Read the position of all motor encoders. More... | |
| bool | getMotorEncodersTimed (double *encs, double *t) override |
| Read the instantaneous position of all motor encoders. More... | |
| bool | getMotorEncoderTimed (int m, double *v, double *t) override |
| Read the instantaneous position of a motor encoder. More... | |
| bool | getMotorEncoderSpeed (int m, double *sp) override |
| Read the istantaneous speed of a motor encoder. More... | |
| bool | getMotorEncoderSpeeds (double *spds) override |
| Read the instantaneous speed of all motor encoders. More... | |
| bool | getMotorEncoderAcceleration (int m, double *acc) override |
| Read the instantaneous acceleration of a motor encoder. More... | |
| bool | getMotorEncoderAccelerations (double *accs) override |
| Read the instantaneous acceleration of all motor encoders. More... | |
| Public Member Functions inherited from yarp::dev::IMotorEncoders | |
| virtual | ~IMotorEncoders () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperAmplifierControl | |
| bool | enableAmp (int j) override |
| Enable the amplifier on a specific joint. More... | |
| bool | disableAmp (int j) override |
| Disable the amplifier on a specific joint. More... | |
| bool | getAmpStatus (int *st) override |
| bool | getAmpStatus (int j, int *v) override |
| bool | getCurrent (int m, double *curr) override |
| bool | getCurrents (double *currs) override |
| bool | setMaxCurrent (int j, double v) override |
| bool | getMaxCurrent (int j, double *v) override |
| Returns the maximum electric current allowed for a given motor. More... | |
| bool | getNominalCurrent (int m, double *val) override |
| bool | setNominalCurrent (int m, const double val) override |
| bool | getPeakCurrent (int m, double *val) override |
| bool | setPeakCurrent (int m, const double val) override |
| bool | getPWM (int m, double *val) override |
| bool | getPWMLimit (int m, double *val) override |
| bool | setPWMLimit (int m, const double val) override |
| bool | getPowerSupplyVoltage (int m, double *val) override |
| Public Member Functions inherited from yarp::dev::IAmplifierControl | |
| virtual | ~IAmplifierControl () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperControlLimits | |
| bool | setLimits (int j, double min, double max) override |
| Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More... | |
| bool | getLimits (int j, double *min, double *max) override |
| Get the software limits for a particular axis. More... | |
| bool | setVelLimits (int j, double min, double max) override |
| Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More... | |
| bool | getVelLimits (int j, double *min, double *max) override |
| Get the software speed limits for a particular axis. More... | |
| Public Member Functions inherited from yarp::dev::IControlLimits | |
| virtual | ~IControlLimits () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperRemoteCalibrator | |
| bool | isCalibratorDevicePresent (bool *isCalib) override |
| isCalibratorDevicePresent: check if a calibrator device has been set More... | |
| yarp::dev::IRemoteCalibrator * | getCalibratorDevice () override |
| getCalibratorDevice: return the pointer stored with the setCalibratorDevice More... | |
| bool | calibrateSingleJoint (int j) override |
| calibrateSingleJoint: call the calibration procedure for the single joint More... | |
| bool | calibrateWholePart () override |
| calibrateWholePart: call the procedure for calibrating the whole device More... | |
| bool | homingSingleJoint (int j) override |
| homingSingleJoint: call the homing procedure for a single joint More... | |
| bool | homingWholePart () override |
| homingWholePart: call the homing procedure for a the whole part/device More... | |
| bool | parkSingleJoint (int j, bool _wait=true) override |
| parkSingleJoint(): start the parking procedure for the single joint More... | |
| bool | parkWholePart () override |
| parkWholePart: start the parking procedure for the whole part More... | |
| bool | quitCalibrate () override |
| quitCalibrate: interrupt the calibration procedure More... | |
| bool | quitPark () override |
| quitPark: interrupt the park procedure More... | |
| Public Member Functions inherited from yarp::dev::IRemoteCalibrator | |
| IRemoteCalibrator () | |
| This interface is meant to remotize the access of the calibration device in order to allow users to remotely call the calibration procedure for a single joint or the whole device and let the calibrator do the job. More... | |
| virtual | ~IRemoteCalibrator ()=default |
| virtual bool | setCalibratorDevice (yarp::dev::IRemoteCalibrator *dev) |
| setCalibratorDevice: store the pointer to the calibrator device. More... | |
| virtual void | releaseCalibratorDevice () |
| releaseCalibratorDevice: reset the internal pointer to NULL when stop using the calibrator More... | |
| Public Member Functions inherited from ControlBoardWrapperControlCalibration | |
| bool | calibrateAxisWithParams (int j, unsigned int ui, double v1, double v2, double v3) override |
| Start calibration, this method is very often platform specific. More... | |
| bool | setCalibrationParameters (int j, const yarp::dev::CalibrationParameters ¶ms) override |
| Start calibration, this method is very often platform specific. More... | |
| bool | calibrationDone (int j) override |
| Check if the calibration is terminated, on a particular joint. More... | |
| bool | abortPark () override |
| bool | abortCalibration () override |
| Public Member Functions inherited from yarp::dev::IControlCalibration | |
| IControlCalibration () | |
| virtual | ~IControlCalibration () |
| Destructor. More... | |
| virtual bool | setCalibrator (ICalibrator *c) |
| Set the calibrator object to be used to calibrate the robot. More... | |
| virtual bool | calibrateRobot () |
| Calibrate robot by using an external calibrator. More... | |
| virtual bool | park (bool wait=true) |
| Public Member Functions inherited from ControlBoardWrapperTorqueControl | |
| bool | getAxes (int *ax) override |
| Get the number of controlled axes. More... | |
| bool | getRefTorques (double *refs) override |
| Get the reference value of the torque for all joints. More... | |
| bool | getRefTorque (int j, double *t) override |
| Get the reference value of the torque for a given joint. More... | |
| bool | setRefTorques (const double *t) override |
| Set the reference value of the torque for all joints. More... | |
| bool | setRefTorque (int j, double t) override |
| Set the reference value of the torque for a given joint. More... | |
| bool | setRefTorques (const int n_joint, const int *joints, const double *t) override |
| Set new torque reference for a subset of joints. More... | |
| bool | getMotorTorqueParams (int j, yarp::dev::MotorTorqueParameters *params) override |
| Get a subset of motor parameters (bemf, ktau etc) useful for torque control. More... | |
| bool | setMotorTorqueParams (int j, const yarp::dev::MotorTorqueParameters params) override |
| Set a subset of motor parameters (bemf, ktau etc) useful for torque control. More... | |
| bool | getTorque (int j, double *t) override |
| Get the value of the torque on a given joint (this is the feedback if you have a torque sensor). More... | |
| bool | getTorques (double *t) override |
| Get the value of the torque for all joints (this is the feedback if you have torque sensors). More... | |
| bool | getTorqueRange (int j, double *min, double *max) override |
| Get the full scale of the torque sensor of a given joint. More... | |
| bool | getTorqueRanges (double *min, double *max) override |
| Get the full scale of the torque sensors of all joints. More... | |
| Public Member Functions inherited from yarp::dev::ITorqueControl | |
| virtual | ~ITorqueControl () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperImpedanceControl | |
| bool | getAxes (int *ax) override |
| Get the number of controlled axes. More... | |
| bool | setImpedance (int j, double stiff, double damp) override |
| Set current impedance gains (stiffness,damping) for a specific joint. More... | |
| bool | setImpedanceOffset (int j, double offset) override |
| Set current force Offset for a specific joint. More... | |
| bool | getImpedance (int j, double *stiff, double *damp) override |
| Get current impedance gains (stiffness,damping,offset) for a specific joint. More... | |
| bool | getImpedanceOffset (int j, double *offset) override |
| Get current force Offset for a specific joint. More... | |
| bool | getCurrentImpedanceLimit (int j, double *min_stiff, double *max_stiff, double *min_damp, double *max_damp) override |
| Get the current impedandance limits for a specific joint. More... | |
| Public Member Functions inherited from yarp::dev::IImpedanceControl | |
| virtual | ~IImpedanceControl () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperControlMode | |
| bool | getControlMode (int j, int *mode) override |
| Get the current control mode. More... | |
| bool | getControlModes (int *modes) override |
| Get the current control mode (multiple joints). More... | |
| bool | getControlModes (const int n_joint, const int *joints, int *modes) override |
| Get the current control mode for a subset of axes. More... | |
| bool | setControlMode (const int j, const int mode) override |
| Set the current control mode. More... | |
| bool | setControlModes (const int n_joints, const int *joints, int *modes) override |
| Set the current control mode for a subset of axes. More... | |
| bool | setControlModes (int *modes) override |
| Set the current control mode (multiple joints). More... | |
| Public Member Functions inherited from yarp::dev::IControlMode | |
| virtual | ~IControlMode () |
| Public Member Functions inherited from ControlBoardWrapperAxisInfo | |
| bool | getAxisName (int j, std::string &name) override |
| bool | getJointType (int j, yarp::dev::JointTypeEnum &type) override |
| Public Member Functions inherited from yarp::dev::IAxisInfo | |
| virtual | ~IAxisInfo () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperPreciselyTimed | |
| yarp::os::Stamp | getLastInputStamp () override |
| Return the time stamp relative to the last acquisition. More... | |
| Public Member Functions inherited from yarp::dev::IPreciselyTimed | |
| virtual | ~IPreciselyTimed () |
| Public Member Functions inherited from ControlBoardWrapperInteractionMode | |
| bool | getInteractionMode (int j, yarp::dev::InteractionModeEnum *mode) override |
| Get the current interaction mode of the robot, values can be stiff or compliant. More... | |
| bool | getInteractionModes (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| Get the current interaction mode of the robot for a set of joints, values can be stiff or compliant. More... | |
| bool | getInteractionModes (yarp::dev::InteractionModeEnum *modes) override |
| Get the current interaction mode of the robot for a all the joints, values can be stiff or compliant. More... | |
| bool | setInteractionMode (int j, yarp::dev::InteractionModeEnum mode) override |
| Set the interaction mode of the robot, values can be stiff or compliant. More... | |
| bool | setInteractionModes (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| Set the interaction mode of the robot for a set of joints, values can be stiff or compliant. More... | |
| bool | setInteractionModes (yarp::dev::InteractionModeEnum *modes) override |
| Set the interaction mode of the robot for a all the joints, values can be stiff or compliant. More... | |
| Public Member Functions inherited from yarp::dev::IInteractionMode | |
| virtual | ~IInteractionMode () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperRemoteVariables | |
| bool | getRemoteVariable (std::string key, yarp::os::Bottle &val) override |
| bool | setRemoteVariable (std::string key, const yarp::os::Bottle &val) override |
| bool | getRemoteVariablesList (yarp::os::Bottle *listOfKeys) override |
| Public Member Functions inherited from yarp::dev::IRemoteVariables | |
| virtual | ~IRemoteVariables () |
| Destructor. More... | |
| Public Member Functions inherited from ControlBoardWrapperPWMControl | |
| bool | getNumberOfMotors (int *num) override |
| Retrieves the number of controlled motors from the current physical interface. More... | |
| bool | setRefDutyCycle (int j, double v) override |
| Sets the reference dutycycle to a single motor. More... | |
| bool | setRefDutyCycles (const double *v) override |
| Sets the reference dutycycle for all the motors. More... | |
| bool | getRefDutyCycle (int j, double *v) override |
| Gets the last reference sent using the setRefDutyCycle function. More... | |
| bool | getRefDutyCycles (double *v) override |
| Gets the last reference sent using the setRefDutyCycles function. More... | |
| bool | getDutyCycle (int j, double *v) override |
| Gets the current dutycycle of the output of the amplifier (i.e. More... | |
| bool | getDutyCycles (double *v) override |
| Gets the current dutycycle of the output of the amplifier (i.e. More... | |
| Public Member Functions inherited from yarp::dev::IPWMControl | |
| virtual | ~IPWMControl () |
| Public Member Functions inherited from ControlBoardWrapperCurrentControl | |
| bool | getNumberOfMotors (int *num) override |
| Retrieves the number of controlled axes from the current physical interface. More... | |
| bool | getCurrent (int m, double *curr) override |
| Get the instantaneous current measurement for a single motor. More... | |
| bool | getCurrents (double *currs) override |
| Get the instantaneous current measurement for all motors. More... | |
| bool | getCurrentRange (int j, double *min, double *max) override |
| Get the full scale of the current measurement for a given motor (e.g. More... | |
| bool | getCurrentRanges (double *min, double *max) override |
| Get the full scale of the current measurements for all motors motor (e.g. More... | |
| bool | setRefCurrents (const double *t) override |
| Set the reference value of the currents for all motors. More... | |
| bool | setRefCurrent (int j, double t) override |
| Set the reference value of the current for a single motor. More... | |
| bool | setRefCurrents (const int n_joint, const int *joints, const double *t) override |
| Set the reference value of the current for a group of motors. More... | |
| bool | getRefCurrents (double *t) override |
| Get the reference value of the currents for all motors. More... | |
| bool | getRefCurrent (int j, double *t) override |
| Get the reference value of the current for a single motor. More... | |
| Public Member Functions inherited from yarp::dev::ICurrentControl | |
| virtual | ~ICurrentControl () |
| Destructor. More... | |
Additional Inherited Members | |
| Public Attributes inherited from ControlBoardWrapperCommon | |
| WrappedDevice | device |
| size_t | controlledJoints {0} |
| std::string | partName |
| std::mutex | rpcDataMutex |
| MultiJointData | rpcData |
| std::mutex | timeMutex |
| yarp::os::Stamp | time |
| Protected Member Functions inherited from yarp::os::PeriodicThread | |
| virtual bool | threadInit () |
| Initialization method. More... | |
| virtual void | threadRelease () |
| Release method. More... | |
| virtual void | beforeStart () |
| Called just before a new thread starts. More... | |
| virtual void | afterStart (bool success) |
| Called just after a new thread starts (or fails to start), this is executed by the same thread that calls start(). More... | |
controlboardwrapper2: An updated version of the controlBoard network wrapper.
It can merge together more than one control board device, or use only a portion of it by remapping functionality. Allows also deferred attach/detach of a subdevice.
Parameters required by this device are:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| name | - | string | - | - | Yes | full name of the port opened by the device, like /robotName/part/ | MUST start with a '/' character |
| period | - | int | ms | 20 | No | refresh period of the broadcasted values in ms | optional, default 20ms |
| subdevice | - | string | - | - | alternative to netwok group | name of the subdevice to instantiate | when used, parameters for the subdevice must be provided as well |
| networks | - | group | - | - | alternative to subdevice | this is expected to be a group parameter in xml format, a list in .ini file format. SubParameter are mandatory if this is used | - |
| - | networkName_1 | 4 * int | joint number | - | if networks is used | describe how to match subdevice_1 joints with the wrapper joints. First 2 numbers indicate first/last wrapper joint, last 2 numbers are subdevice first/last joint | The joints are intended to be consequent |
| - | ... | 4 * int | joint number | - | if networks is used | same as above | The joints are intended to be consequent |
| - | networkName_n | 4 * int | joint number | - | if networks is used | same as above | The joints are intended to be consequent |
| - | joints | int | - | - | if networks is used | total number of joints handled by the wrapper | MUST match the sum of joints from all the networks |
| ROS | - | group | - | - | No | Group containing parameter for ROS topic initialization | if missing, it is assumed to not use ROS topics |
| - | useROS | string | true/false/only | - | if ROS group is present | set 'true' to have both yarp ports and ROS topic, set 'only' to have only ROS topic and no yarp port | - |
| - | ROS_topicName | string | - | - | if ROS group is present | set the name for ROS topic | must start with a leading '/' |
| - | ROS_nodeName | string | - | - | if ROS group is present | set the name for ROS node | must start with a leading '/' |
| - | jointNames | string | - | - | deprecated | joints names are now got from attached motionControl device | names order must match with the joint order, from 0 to N |
ROS message type used is sensor_msgs/JointState.msg (http://docs.ros.org/api/sensor_msgs/html/msg/JointState.html) Some example of configuration files:
Configuration file using .ini format, using subdevice keyword.
XML format, using 'networks' keyword. This file is meant to be used in junction with yarprobotinterface executable, therefore has an addictional section at the end.
Configuration file using .ini format, using network keyword
Configuration for ROS topic using .ini format
Configuration for ROS topic using .xml format
Definition at line 179 of file ControlBoardWrapper.h.
| ControlBoardWrapper::ControlBoardWrapper | ( | ) |
Definition at line 33 of file ControlBoardWrapper.cpp.
|
delete |
|
delete |
|
overridedefault |
|
overridevirtual |
Attach to a list of objects.
| p | the polydriver list that you want to attach to. |
Implements yarp::dev::IMultipleWrapper.
Definition at line 694 of file ControlBoardWrapper.cpp.
|
overridevirtual |
Close the device driver by deallocating all resources and closing ports.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 62 of file ControlBoardWrapper.cpp.
|
overridevirtual |
Detach the object (you must have first called attach).
Implements yarp::dev::IMultipleWrapper.
Definition at line 753 of file ControlBoardWrapper.cpp.
|
inline |
Definition at line 269 of file ControlBoardWrapper.h.
|
overridevirtual |
Open the device driver.
| prop | is a Searchable object which contains the parameters. Allowed parameters are:
|
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 338 of file ControlBoardWrapper.cpp.
|
delete |
|
delete |
|
overridevirtual |
The thread main loop deals with writing on ports here.
Implements yarp::os::PeriodicThread.
Definition at line 777 of file ControlBoardWrapper.cpp.