|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
#include <ControlBoardWrapper/ControlBoardWrapperMotorEncoders.h>
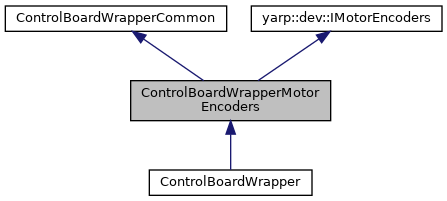
 Inheritance diagram for ControlBoardWrapperMotorEncoders:
Inheritance diagram for ControlBoardWrapperMotorEncoders:Public Member Functions | |
| bool | getNumberOfMotorEncoders (int *num) override |
| Get the number of available motor encoders. More... | |
| bool | resetMotorEncoder (int m) override |
| Reset motor encoder, single motor. More... | |
| bool | resetMotorEncoders () override |
| Reset motor encoders. More... | |
| bool | setMotorEncoderCountsPerRevolution (int m, const double cpr) override |
| Sets number of counts per revolution for motor encoder m. More... | |
| bool | getMotorEncoderCountsPerRevolution (int m, double *cpr) override |
| Gets number of counts per revolution for motor encoder m. More... | |
| bool | setMotorEncoder (int m, const double val) override |
| Set the value of the motor encoder for a given motor. More... | |
| bool | setMotorEncoders (const double *vals) override |
| Set the value of all motor encoders. More... | |
| bool | getMotorEncoder (int m, double *v) override |
| Read the value of a motor encoder. More... | |
| bool | getMotorEncoders (double *encs) override |
| Read the position of all motor encoders. More... | |
| bool | getMotorEncodersTimed (double *encs, double *t) override |
| Read the instantaneous position of all motor encoders. More... | |
| bool | getMotorEncoderTimed (int m, double *v, double *t) override |
| Read the instantaneous position of a motor encoder. More... | |
| bool | getMotorEncoderSpeed (int m, double *sp) override |
| Read the istantaneous speed of a motor encoder. More... | |
| bool | getMotorEncoderSpeeds (double *spds) override |
| Read the instantaneous speed of all motor encoders. More... | |
| bool | getMotorEncoderAcceleration (int m, double *acc) override |
| Read the instantaneous acceleration of a motor encoder. More... | |
| bool | getMotorEncoderAccelerations (double *accs) override |
| Read the instantaneous acceleration of all motor encoders. More... | |
| Public Member Functions inherited from ControlBoardWrapperCommon | |
| bool | getAxes (int *ax) |
| bool | setRefAcceleration (int j, double acc) |
| bool | setRefAccelerations (const double *accs) |
| bool | setRefAccelerations (const int n_joints, const int *joints, const double *accs) |
| bool | getRefAcceleration (int j, double *acc) |
| bool | getRefAccelerations (double *accs) |
| bool | getRefAccelerations (const int n_joints, const int *joints, double *accs) |
| bool | stop (int j) |
| bool | stop () |
| bool | stop (const int n_joint, const int *joints) |
| bool | getNumberOfMotors (int *num) |
| bool | getCurrent (int m, double *curr) |
| bool | getCurrents (double *currs) |
| void | printError (const std::string &func_name, const std::string &info, bool result) |
| Public Member Functions inherited from yarp::dev::IMotorEncoders | |
| virtual | ~IMotorEncoders () |
| Destructor. More... | |
Additional Inherited Members | |
| Public Attributes inherited from ControlBoardWrapperCommon | |
| WrappedDevice | device |
| size_t | controlledJoints {0} |
| std::string | partName |
| std::mutex | rpcDataMutex |
| MultiJointData | rpcData |
| std::mutex | timeMutex |
| yarp::os::Stamp | time |
Definition at line 16 of file ControlBoardWrapperMotorEncoders.h.
|
overridevirtual |
Read the value of a motor encoder.
| m | motor encoder number |
| v | pointer to storage for the return value |
Implements yarp::dev::IMotorEncoders.
Definition at line 128 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Read the instantaneous acceleration of a motor encoder.
| m | motor number |
| acc | pointer to the array that will contain the output |
Implements yarp::dev::IMotorEncoders.
Definition at line 267 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Read the instantaneous acceleration of all motor encoders.
| accs | pointer to the array that will contain the output |
Implements yarp::dev::IMotorEncoders.
Definition at line 285 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Gets number of counts per revolution for motor encoder m.
| m | motor number |
| cpr | vals pointer to the new value |
Implements yarp::dev::IMotorEncoders.
Definition at line 110 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Read the position of all motor encoders.
| encs | pointer to the array that will contain the output |
Implements yarp::dev::IMotorEncoders.
Definition at line 146 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Read the istantaneous speed of a motor encoder.
| m | motor number |
| sp | pointer to storage for the output |
Implements yarp::dev::IMotorEncoders.
Definition at line 222 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Read the instantaneous speed of all motor encoders.
| spds | pointer to storage for the output values |
Implements yarp::dev::IMotorEncoders.
Definition at line 240 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Read the instantaneous position of all motor encoders.
| encs | pointer to the array that will contain the output |
| time | pointer to the array that will contain individual timestamps |
Implements yarp::dev::IMotorEncoders.
Definition at line 174 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Read the instantaneous position of a motor encoder.
| m | motor index |
| encs | encoder value (pointer to) |
| time | corresponding timestamp (pointer to) |
Implements yarp::dev::IMotorEncoders.
Definition at line 204 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Get the number of available motor encoders.
| m | pointer to a value representing the number of available motor encoders. |
Implements yarp::dev::IMotorEncoders.
Definition at line 312 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Reset motor encoder, single motor.
Set the encoder value to zero.
| m | motor number |
Implements yarp::dev::IMotorEncoders.
Definition at line 13 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Reset motor encoders.
Set the motor encoders value to zero.
Implements yarp::dev::IMotorEncoders.
Definition at line 30 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Set the value of the motor encoder for a given motor.
| m | motor number |
| val | new value |
Implements yarp::dev::IMotorEncoders.
Definition at line 53 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Sets number of counts per revolution for motor encoder m.
| m | motor number |
| cpr | new value |
Implements yarp::dev::IMotorEncoders.
Definition at line 93 of file ControlBoardWrapperMotorEncoders.cpp.
|
overridevirtual |
Set the value of all motor encoders.
| vals | pointer to the new values |
Implements yarp::dev::IMotorEncoders.
Definition at line 70 of file ControlBoardWrapperMotorEncoders.cpp.