|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
#include <ControlBoardWrapper/ControlBoardWrapperPreciselyTimed.h>
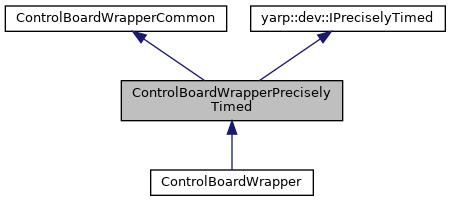
 Inheritance diagram for ControlBoardWrapperPreciselyTimed:
Inheritance diagram for ControlBoardWrapperPreciselyTimed:Public Member Functions | |
| yarp::os::Stamp | getLastInputStamp () override |
| Return the time stamp relative to the last acquisition. More... | |
| Public Member Functions inherited from ControlBoardWrapperCommon | |
| bool | getAxes (int *ax) |
| bool | setRefAcceleration (int j, double acc) |
| bool | setRefAccelerations (const double *accs) |
| bool | setRefAccelerations (const int n_joints, const int *joints, const double *accs) |
| bool | getRefAcceleration (int j, double *acc) |
| bool | getRefAccelerations (double *accs) |
| bool | getRefAccelerations (const int n_joints, const int *joints, double *accs) |
| bool | stop (int j) |
| bool | stop () |
| bool | stop (const int n_joint, const int *joints) |
| bool | getNumberOfMotors (int *num) |
| bool | getCurrent (int m, double *curr) |
| bool | getCurrents (double *currs) |
| void | printError (const std::string &func_name, const std::string &info, bool result) |
| Public Member Functions inherited from yarp::dev::IPreciselyTimed | |
| virtual | ~IPreciselyTimed () |
Additional Inherited Members | |
| Public Attributes inherited from ControlBoardWrapperCommon | |
| WrappedDevice | device |
| size_t | controlledJoints {0} |
| std::string | partName |
| std::mutex | rpcDataMutex |
| MultiJointData | rpcData |
| std::mutex | timeMutex |
| yarp::os::Stamp | time |
Definition at line 17 of file ControlBoardWrapperPreciselyTimed.h.
|
overridevirtual |
Return the time stamp relative to the last acquisition.
Implements yarp::dev::IPreciselyTimed.
Definition at line 16 of file ControlBoardWrapperPreciselyTimed.cpp.