|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
#include <ControlBoardWrapper/ControlBoardWrapperRemoteCalibrator.h>
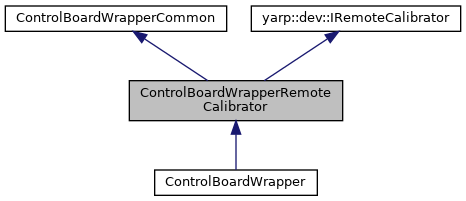
 Inheritance diagram for ControlBoardWrapperRemoteCalibrator:
Inheritance diagram for ControlBoardWrapperRemoteCalibrator:Public Member Functions | |
| bool | isCalibratorDevicePresent (bool *isCalib) override |
| isCalibratorDevicePresent: check if a calibrator device has been set More... | |
| yarp::dev::IRemoteCalibrator * | getCalibratorDevice () override |
| getCalibratorDevice: return the pointer stored with the setCalibratorDevice More... | |
| bool | calibrateSingleJoint (int j) override |
| calibrateSingleJoint: call the calibration procedure for the single joint More... | |
| bool | calibrateWholePart () override |
| calibrateWholePart: call the procedure for calibrating the whole device More... | |
| bool | homingSingleJoint (int j) override |
| homingSingleJoint: call the homing procedure for a single joint More... | |
| bool | homingWholePart () override |
| homingWholePart: call the homing procedure for a the whole part/device More... | |
| bool | parkSingleJoint (int j, bool _wait=true) override |
| parkSingleJoint(): start the parking procedure for the single joint More... | |
| bool | parkWholePart () override |
| parkWholePart: start the parking procedure for the whole part More... | |
| bool | quitCalibrate () override |
| quitCalibrate: interrupt the calibration procedure More... | |
| bool | quitPark () override |
| quitPark: interrupt the park procedure More... | |
| Public Member Functions inherited from ControlBoardWrapperCommon | |
| bool | getAxes (int *ax) |
| bool | setRefAcceleration (int j, double acc) |
| bool | setRefAccelerations (const double *accs) |
| bool | setRefAccelerations (const int n_joints, const int *joints, const double *accs) |
| bool | getRefAcceleration (int j, double *acc) |
| bool | getRefAccelerations (double *accs) |
| bool | getRefAccelerations (const int n_joints, const int *joints, double *accs) |
| bool | stop (int j) |
| bool | stop () |
| bool | stop (const int n_joint, const int *joints) |
| bool | getNumberOfMotors (int *num) |
| bool | getCurrent (int m, double *curr) |
| bool | getCurrents (double *currs) |
| void | printError (const std::string &func_name, const std::string &info, bool result) |
| Public Member Functions inherited from yarp::dev::IRemoteCalibrator | |
| IRemoteCalibrator () | |
| This interface is meant to remotize the access of the calibration device in order to allow users to remotely call the calibration procedure for a single joint or the whole device and let the calibrator do the job. More... | |
| virtual | ~IRemoteCalibrator ()=default |
| virtual bool | setCalibratorDevice (yarp::dev::IRemoteCalibrator *dev) |
| setCalibratorDevice: store the pointer to the calibrator device. More... | |
| virtual void | releaseCalibratorDevice () |
| releaseCalibratorDevice: reset the internal pointer to NULL when stop using the calibrator More... | |
Additional Inherited Members | |
| Public Attributes inherited from ControlBoardWrapperCommon | |
| WrappedDevice | device |
| size_t | controlledJoints {0} |
| std::string | partName |
| std::mutex | rpcDataMutex |
| MultiJointData | rpcData |
| std::mutex | timeMutex |
| yarp::os::Stamp | time |
Definition at line 17 of file ControlBoardWrapperRemoteCalibrator.h.
|
overridevirtual |
calibrateSingleJoint: call the calibration procedure for the single joint
| j | joint to be calibrated |
Implements yarp::dev::IRemoteCalibrator.
Definition at line 29 of file ControlBoardWrapperRemoteCalibrator.cpp.
|
overridevirtual |
calibrateWholePart: call the procedure for calibrating the whole device
Implements yarp::dev::IRemoteCalibrator.
Definition at line 39 of file ControlBoardWrapperRemoteCalibrator.cpp.
|
overridevirtual |
getCalibratorDevice: return the pointer stored with the setCalibratorDevice
Reimplemented from yarp::dev::IRemoteCalibrator.
Definition at line 17 of file ControlBoardWrapperRemoteCalibrator.cpp.
|
overridevirtual |
homingSingleJoint: call the homing procedure for a single joint
| j | joint to be calibrated |
Implements yarp::dev::IRemoteCalibrator.
Definition at line 49 of file ControlBoardWrapperRemoteCalibrator.cpp.
|
overridevirtual |
homingWholePart: call the homing procedure for a the whole part/device
Implements yarp::dev::IRemoteCalibrator.
Definition at line 59 of file ControlBoardWrapperRemoteCalibrator.cpp.
|
overridevirtual |
isCalibratorDevicePresent: check if a calibrator device has been set
Reimplemented from yarp::dev::IRemoteCalibrator.
Definition at line 23 of file ControlBoardWrapperRemoteCalibrator.cpp.
|
overridevirtual |
parkSingleJoint(): start the parking procedure for the single joint
Implements yarp::dev::IRemoteCalibrator.
Definition at line 69 of file ControlBoardWrapperRemoteCalibrator.cpp.
|
overridevirtual |
parkWholePart: start the parking procedure for the whole part
Implements yarp::dev::IRemoteCalibrator.
Definition at line 79 of file ControlBoardWrapperRemoteCalibrator.cpp.
|
overridevirtual |
quitCalibrate: interrupt the calibration procedure
Implements yarp::dev::IRemoteCalibrator.
Definition at line 89 of file ControlBoardWrapperRemoteCalibrator.cpp.
|
overridevirtual |
quitPark: interrupt the park procedure
Implements yarp::dev::IRemoteCalibrator.
Definition at line 99 of file ControlBoardWrapperRemoteCalibrator.cpp.