|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
IRemoteCalibrator interface is meant to remotize the access of the calibration device in order to allow users to remotely call the calibration procedure for a single joint or the whole device and let the calibrator do the job. More...
#include <yarp/dev/IRemoteCalibrator.h>
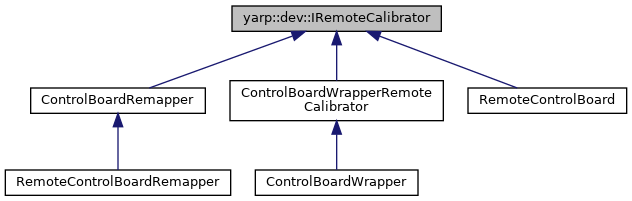
 Inheritance diagram for yarp::dev::IRemoteCalibrator:
Inheritance diagram for yarp::dev::IRemoteCalibrator:Public Member Functions | |
| IRemoteCalibrator () | |
| This interface is meant to remotize the access of the calibration device in order to allow users to remotely call the calibration procedure for a single joint or the whole device and let the calibrator do the job. More... | |
| virtual | ~IRemoteCalibrator ()=default |
| virtual bool | setCalibratorDevice (yarp::dev::IRemoteCalibrator *dev) |
| setCalibratorDevice: store the pointer to the calibrator device. More... | |
| virtual yarp::dev::IRemoteCalibrator * | getCalibratorDevice () |
| getCalibratorDevice: return the pointer stored with the setCalibratorDevice More... | |
| virtual bool | isCalibratorDevicePresent (bool *isCalib) |
| isCalibratorDevicePresent: check if a calibrator device has been set More... | |
| virtual void | releaseCalibratorDevice () |
| releaseCalibratorDevice: reset the internal pointer to NULL when stop using the calibrator More... | |
| virtual bool | calibrateSingleJoint (int j)=0 |
| calibrateSingleJoint: call the calibration procedure for the single joint More... | |
| virtual bool | calibrateWholePart ()=0 |
| calibrateWholePart: call the procedure for calibrating the whole device More... | |
| virtual bool | homingSingleJoint (int j)=0 |
| homingSingleJoint: call the homing procedure for a single joint More... | |
| virtual bool | homingWholePart ()=0 |
| homingWholePart: call the homing procedure for a the whole part/device More... | |
| virtual bool | parkSingleJoint (int j, bool _wait=true)=0 |
| parkSingleJoint(): start the parking procedure for the single joint More... | |
| virtual bool | parkWholePart ()=0 |
| parkWholePart: start the parking procedure for the whole part More... | |
| virtual bool | quitCalibrate ()=0 |
| quitCalibrate: interrupt the calibration procedure More... | |
| virtual bool | quitPark ()=0 |
| quitPark: interrupt the park procedure More... | |
IRemoteCalibrator interface is meant to remotize the access of the calibration device in order to allow users to remotely call the calibration procedure for a single joint or the whole device and let the calibrator do the job.
Main difference between this interface and remotizing the iControlCalibration interfaces is that in this case we are calling a proper iCalibrator device (whose interface is described above) that knows the correct procedure and the correct parameters for the calibration, so that user doesn't have to worry about configuration. This is meant to be used by network wrapper devices
Definition at line 29 of file IRemoteCalibrator.h.
| IRemoteCalibrator::IRemoteCalibrator | ( | ) |
This interface is meant to remotize the access of the calibration device in order to allow users to remotely call the calibration procedure for a single joint or the whole device and let the calibrator do the job.
Main difference between this interface and remotizing the iControlCalibration interfaces is that in this case we are calling a proper iCalibrator device that knows the correct procedure and the correct parameters for the calibration, so that user doesn't have to worry about configuration parameters.
Definition at line 23 of file IRemoteCalibrator.cpp.
|
virtualdefault |
|
pure virtual |
calibrateSingleJoint: call the calibration procedure for the single joint
| j | joint to be calibrated |
Implemented in RemoteControlBoard, ControlBoardWrapperRemoteCalibrator, and ControlBoardRemapper.
|
pure virtual |
calibrateWholePart: call the procedure for calibrating the whole device
Implemented in RemoteControlBoard, ControlBoardWrapperRemoteCalibrator, and ControlBoardRemapper.
|
virtual |
getCalibratorDevice: return the pointer stored with the setCalibratorDevice
Reimplemented in ControlBoardWrapperRemoteCalibrator, and ControlBoardRemapper.
Definition at line 34 of file IRemoteCalibrator.cpp.
|
pure virtual |
homingSingleJoint: call the homing procedure for a single joint
| j | joint to be calibrated |
Implemented in RemoteControlBoard, ControlBoardWrapperRemoteCalibrator, and ControlBoardRemapper.
|
pure virtual |
homingWholePart: call the homing procedure for a the whole part/device
Implemented in RemoteControlBoard, ControlBoardWrapperRemoteCalibrator, and ControlBoardRemapper.
|
virtual |
isCalibratorDevicePresent: check if a calibrator device has been set
Reimplemented in RemoteControlBoard, ControlBoardWrapperRemoteCalibrator, and ControlBoardRemapper.
Definition at line 39 of file IRemoteCalibrator.cpp.
|
pure virtual |
parkSingleJoint(): start the parking procedure for the single joint
Implemented in RemoteControlBoard, ControlBoardWrapperRemoteCalibrator, and ControlBoardRemapper.
|
pure virtual |
parkWholePart: start the parking procedure for the whole part
Implemented in RemoteControlBoard, ControlBoardWrapperRemoteCalibrator, and ControlBoardRemapper.
|
pure virtual |
quitCalibrate: interrupt the calibration procedure
Implemented in RemoteControlBoard, ControlBoardWrapperRemoteCalibrator, and ControlBoardRemapper.
|
pure virtual |
quitPark: interrupt the park procedure
Implemented in RemoteControlBoard, ControlBoardWrapperRemoteCalibrator, and ControlBoardRemapper.
|
virtual |
releaseCalibratorDevice: reset the internal pointer to NULL when stop using the calibrator
Definition at line 45 of file IRemoteCalibrator.cpp.
|
virtual |
setCalibratorDevice: store the pointer to the calibrator device.
Has a default implementation and it is meant to be called only by wrapper devices attached to the calibrator. It will be not used by remote device like remoteControlBoard.
| dev | device implementing the IRemotizableCalibrator interface |
Definition at line 28 of file IRemoteCalibrator.cpp.