|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
Interface for control devices, amplifier commands. More...
#include <yarp/dev/IAmplifierControl.h>
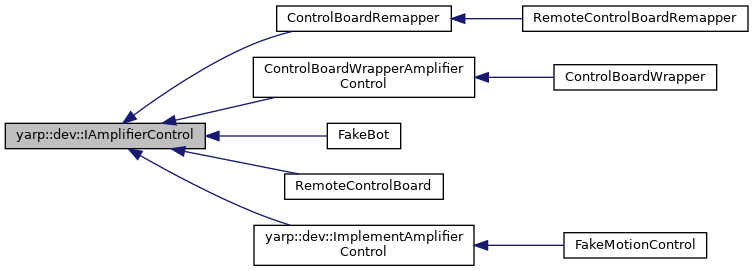
 Inheritance diagram for yarp::dev::IAmplifierControl:
Inheritance diagram for yarp::dev::IAmplifierControl:Public Member Functions | |
| virtual | ~IAmplifierControl () |
| Destructor. More... | |
| virtual bool | enableAmp (int j)=0 |
| Enable the amplifier on a specific joint. More... | |
| virtual bool | disableAmp (int j)=0 |
| Disable the amplifier on a specific joint. More... | |
| virtual bool | getAmpStatus (int *st)=0 |
| virtual bool | getAmpStatus (int j, int *v)=0 |
| virtual bool | getCurrents (double *vals)=0 |
| virtual bool | getCurrent (int j, double *val)=0 |
| virtual bool | getMaxCurrent (int j, double *v)=0 |
| Returns the maximum electric current allowed for a given motor. More... | |
| virtual bool | setMaxCurrent (int j, double v)=0 |
| virtual bool | getNominalCurrent (int m, double *val) |
| virtual bool | setNominalCurrent (int m, const double val) |
| virtual bool | getPeakCurrent (int m, double *val) |
| virtual bool | setPeakCurrent (int m, const double val) |
| virtual bool | getPWM (int j, double *val) |
| virtual bool | getPWMLimit (int j, double *val) |
| virtual bool | setPWMLimit (int j, const double val) |
| virtual bool | getPowerSupplyVoltage (int j, double *val) |
Interface for control devices, amplifier commands.
Definition at line 32 of file IAmplifierControl.h.
|
inlinevirtual |
Destructor.
Definition at line 38 of file IAmplifierControl.h.
|
pure virtual |
Disable the amplifier on a specific joint.
All computations within the board will be carried out normally, but the output will be disabled.
Implemented in yarp::dev::ImplementAmplifierControl, RemoteControlBoard, FakeBot, ControlBoardWrapperAmplifierControl, and ControlBoardRemapper.
|
pure virtual |
Enable the amplifier on a specific joint.
Be careful, check that the output of the controller is appropriate (usually zero), to avoid generating abrupt movements.
Implemented in yarp::dev::ImplementAmplifierControl, RemoteControlBoard, FakeBot, ControlBoardWrapperAmplifierControl, and ControlBoardRemapper.
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
|
pure virtual |
Returns the maximum electric current allowed for a given motor.
Exceeding this value will trigger instantaneous hardware fault.
| j | motor number |
| v | the return value |
Implemented in yarp::dev::ImplementAmplifierControl, RemoteControlBoard, FakeBot, ControlBoardWrapperAmplifierControl, and ControlBoardRemapper.
|
inlinevirtual |
Reimplemented in yarp::dev::ImplementAmplifierControl, RemoteControlBoard, ControlBoardWrapperAmplifierControl, and ControlBoardRemapper.
Definition at line 107 of file IAmplifierControl.h.
|
inlinevirtual |
Reimplemented in yarp::dev::ImplementAmplifierControl, RemoteControlBoard, ControlBoardWrapperAmplifierControl, and ControlBoardRemapper.
Definition at line 129 of file IAmplifierControl.h.
|
inlinevirtual |
Reimplemented in RemoteControlBoard, ControlBoardWrapperAmplifierControl, ControlBoardRemapper, and yarp::dev::ImplementAmplifierControl.
Definition at line 171 of file IAmplifierControl.h.
|
inlinevirtual |
Reimplemented in RemoteControlBoard, ControlBoardWrapperAmplifierControl, ControlBoardRemapper, and yarp::dev::ImplementAmplifierControl.
Definition at line 148 of file IAmplifierControl.h.
|
inlinevirtual |
Reimplemented in RemoteControlBoard, ControlBoardWrapperAmplifierControl, ControlBoardRemapper, and yarp::dev::ImplementAmplifierControl.
Definition at line 156 of file IAmplifierControl.h.
|
pure virtual |
|
inlinevirtual |
Reimplemented in yarp::dev::ImplementAmplifierControl, RemoteControlBoard, ControlBoardWrapperAmplifierControl, and ControlBoardRemapper.
Definition at line 118 of file IAmplifierControl.h.
|
inlinevirtual |
Reimplemented in yarp::dev::ImplementAmplifierControl, RemoteControlBoard, ControlBoardWrapperAmplifierControl, and ControlBoardRemapper.
Definition at line 140 of file IAmplifierControl.h.
|
inlinevirtual |
Reimplemented in RemoteControlBoard, ControlBoardWrapperAmplifierControl, ControlBoardRemapper, and yarp::dev::ImplementAmplifierControl.
Definition at line 164 of file IAmplifierControl.h.