Interface for control boards implementing current control.
More...
#include <yarp/dev/ICurrentControl.h>
|
| virtual | ~ICurrentControl () |
| | Destructor. More...
|
| |
| virtual bool | getNumberOfMotors (int *ax)=0 |
| | Retrieves the number of controlled axes from the current physical interface. More...
|
| |
| virtual bool | getCurrent (int m, double *curr)=0 |
| | Get the instantaneous current measurement for a single motor. More...
|
| |
| virtual bool | getCurrents (double *currs)=0 |
| | Get the instantaneous current measurement for all motors. More...
|
| |
| virtual bool | getCurrentRange (int m, double *min, double *max)=0 |
| | Get the full scale of the current measurement for a given motor (e.g. More...
|
| |
| virtual bool | getCurrentRanges (double *min, double *max)=0 |
| | Get the full scale of the current measurements for all motors motor (e.g. More...
|
| |
| virtual bool | setRefCurrents (const double *currs)=0 |
| | Set the reference value of the currents for all motors. More...
|
| |
| virtual bool | setRefCurrent (int m, double curr)=0 |
| | Set the reference value of the current for a single motor. More...
|
| |
| virtual bool | setRefCurrents (const int n_motor, const int *motors, const double *currs)=0 |
| | Set the reference value of the current for a group of motors. More...
|
| |
| virtual bool | getRefCurrents (double *currs)=0 |
| | Get the reference value of the currents for all motors. More...
|
| |
| virtual bool | getRefCurrent (int m, double *curr)=0 |
| | Get the reference value of the current for a single motor. More...
|
| |
Interface for control boards implementing current control.
Definition at line 27 of file ICurrentControl.h.
◆ ~ICurrentControl()
| virtual yarp::dev::ICurrentControl::~ICurrentControl |
( |
| ) |
|
|
inlinevirtual |
◆ getCurrent()
| virtual bool yarp::dev::ICurrentControl::getCurrent |
( |
int |
m, |
|
|
double * |
curr |
|
) |
| |
|
pure virtual |
◆ getCurrentRange()
| virtual bool yarp::dev::ICurrentControl::getCurrentRange |
( |
int |
m, |
|
|
double * |
min, |
|
|
double * |
max |
|
) |
| |
|
pure virtual |
◆ getCurrentRanges()
| virtual bool yarp::dev::ICurrentControl::getCurrentRanges |
( |
double * |
min, |
|
|
double * |
max |
|
) |
| |
|
pure virtual |
◆ getCurrents()
| virtual bool yarp::dev::ICurrentControl::getCurrents |
( |
double * |
currs | ) |
|
|
pure virtual |
◆ getNumberOfMotors()
| virtual bool yarp::dev::ICurrentControl::getNumberOfMotors |
( |
int * |
ax | ) |
|
|
pure virtual |
◆ getRefCurrent()
| virtual bool yarp::dev::ICurrentControl::getRefCurrent |
( |
int |
m, |
|
|
double * |
curr |
|
) |
| |
|
pure virtual |
◆ getRefCurrents()
| virtual bool yarp::dev::ICurrentControl::getRefCurrents |
( |
double * |
currs | ) |
|
|
pure virtual |
◆ setRefCurrent()
| virtual bool yarp::dev::ICurrentControl::setRefCurrent |
( |
int |
m, |
|
|
double |
curr |
|
) |
| |
|
pure virtual |
◆ setRefCurrents() [1/2]
| virtual bool yarp::dev::ICurrentControl::setRefCurrents |
( |
const double * |
currs | ) |
|
|
pure virtual |
◆ setRefCurrents() [2/2]
| virtual bool yarp::dev::ICurrentControl::setRefCurrents |
( |
const int |
n_motor, |
|
|
const int * |
motors, |
|
|
const double * |
currs |
|
) |
| |
|
pure virtual |
The documentation for this class was generated from the following file:



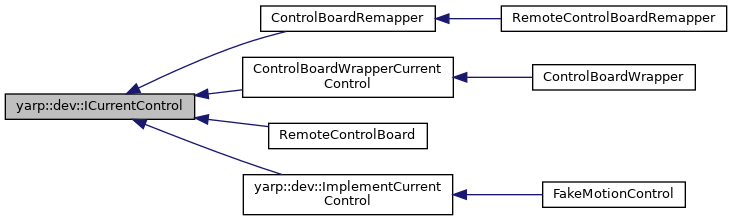
 Inheritance diagram for yarp::dev::ICurrentControl:
Inheritance diagram for yarp::dev::ICurrentControl: