|
| | RemoteControlBoardRemapper ()=default |
| |
| | RemoteControlBoardRemapper (const RemoteControlBoardRemapper &)=delete |
| |
| | RemoteControlBoardRemapper (RemoteControlBoardRemapper &&)=delete |
| |
| RemoteControlBoardRemapper & | operator= (const RemoteControlBoardRemapper &)=delete |
| |
| RemoteControlBoardRemapper & | operator= (RemoteControlBoardRemapper &&)=delete |
| |
| | ~RemoteControlBoardRemapper () override=default |
| |
| bool | open (yarp::os::Searchable &prop) override |
| | Open the device driver. More...
|
| |
| bool | close () override |
| | Close the device driver by deallocating all resources and closing ports. More...
|
| |
| | ControlBoardRemapper ()=default |
| |
| | ControlBoardRemapper (const ControlBoardRemapper &)=delete |
| |
| | ControlBoardRemapper (ControlBoardRemapper &&)=delete |
| |
| ControlBoardRemapper & | operator= (const ControlBoardRemapper &)=delete |
| |
| ControlBoardRemapper & | operator= (ControlBoardRemapper &&)=delete |
| |
| | ~ControlBoardRemapper () override=default |
| |
| bool | verbose () const |
| | Return the value of the verbose flag. More...
|
| |
| bool | detachAll () override |
| | Detach the object (you must have first called attach). More...
|
| |
| bool | attachAll (const yarp::dev::PolyDriverList &l) override |
| | Attach to a list of objects. More...
|
| |
| bool | setPid (const yarp::dev::PidControlTypeEnum &pidtype, int j, const yarp::dev::Pid &p) override |
| | ControlBoard methods. More...
|
| |
| bool | setPids (const yarp::dev::PidControlTypeEnum &pidtype, const yarp::dev::Pid *ps) override |
| | Set new pid value on multiple axes. More...
|
| |
| bool | setPidReference (const yarp::dev::PidControlTypeEnum &pidtype, int j, double ref) override |
| | Set the controller reference for a given axis. More...
|
| |
| bool | setPidReferences (const yarp::dev::PidControlTypeEnum &pidtype, const double *refs) override |
| | Set the controller reference, multiple axes. More...
|
| |
| bool | setPidErrorLimit (const yarp::dev::PidControlTypeEnum &pidtype, int j, double limit) override |
| | Set the error limit for the controller on a specifi joint. More...
|
| |
| bool | setPidErrorLimits (const yarp::dev::PidControlTypeEnum &pidtype, const double *limits) override |
| | Get the error limit for the controller on all joints. More...
|
| |
| bool | getPidError (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *err) override |
| | Get the current error for a joint. More...
|
| |
| bool | getPidErrors (const yarp::dev::PidControlTypeEnum &pidtype, double *errs) override |
| | Get the error of all joints. More...
|
| |
| bool | getPidOutput (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *out) override |
| | Get the output of the controller (e.g. More...
|
| |
| bool | getPidOutputs (const yarp::dev::PidControlTypeEnum &pidtype, double *outs) override |
| | Get the output of the controllers (e.g. More...
|
| |
| bool | setPidOffset (const yarp::dev::PidControlTypeEnum &pidtype, int j, double v) override |
| | Set offset value for a given controller. More...
|
| |
| bool | getPid (const yarp::dev::PidControlTypeEnum &pidtype, int j, yarp::dev::Pid *p) override |
| | Get current pid value for a specific joint. More...
|
| |
| bool | getPids (const yarp::dev::PidControlTypeEnum &pidtype, yarp::dev::Pid *pids) override |
| | Get current pid value for a specific joint. More...
|
| |
| bool | getPidReference (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *ref) override |
| | Get the current reference of the pid controller for a specific joint. More...
|
| |
| bool | getPidReferences (const yarp::dev::PidControlTypeEnum &pidtype, double *refs) override |
| | Get the current reference of all pid controllers. More...
|
| |
| bool | getPidErrorLimit (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *limit) override |
| | Get the error limit for the controller on a specific joint. More...
|
| |
| bool | getPidErrorLimits (const yarp::dev::PidControlTypeEnum &pidtype, double *limits) override |
| | Get the error limit for all controllers. More...
|
| |
| bool | resetPid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| | Reset the controller of a given joint, usually sets the current status of the joint as the reference value for the PID, and resets the integrator. More...
|
| |
| bool | disablePid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| | Disable the pid computation for a joint. More...
|
| |
| bool | enablePid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| | Enable the pid computation for a joint. More...
|
| |
| bool | isPidEnabled (const yarp::dev::PidControlTypeEnum &pidtype, int j, bool *enabled) override |
| | Get the current status (enabled/disabled) of the pid. More...
|
| |
| bool | getAxes (int *ax) override |
| | Get the number of controlled axes. More...
|
| |
| bool | positionMove (int j, double ref) override |
| | Set new reference point for a single axis. More...
|
| |
| bool | positionMove (const double *refs) override |
| | Set new reference point for all axes. More...
|
| |
| bool | positionMove (const int n_joints, const int *joints, const double *refs) override |
| | Set new reference point for a subset of joints. More...
|
| |
| bool | getTargetPosition (const int joint, double *ref) override |
| | Get the last position reference for the specified axis. More...
|
| |
| bool | getTargetPositions (double *refs) override |
| | Get the last position reference for all axes. More...
|
| |
| bool | getTargetPositions (const int n_joint, const int *joints, double *refs) override |
| | Get the last position reference for the specified group of axes. More...
|
| |
| bool | relativeMove (int j, double delta) override |
| | Set relative position. More...
|
| |
| bool | relativeMove (const double *deltas) override |
| | Set relative position, all joints. More...
|
| |
| bool | relativeMove (const int n_joints, const int *joints, const double *deltas) override |
| | Set relative position for a subset of joints. More...
|
| |
| bool | checkMotionDone (int j, bool *flag) override |
| | Check if the current trajectory is terminated. More...
|
| |
| bool | checkMotionDone (bool *flag) override |
| | Check if the current trajectory is terminated. More...
|
| |
| bool | checkMotionDone (const int n_joints, const int *joints, bool *flags) override |
| | Check if the current trajectory is terminated. More...
|
| |
| bool | setRefSpeed (int j, double sp) override |
| | Set reference speed for a joint, this is the speed used during the interpolation of the trajectory. More...
|
| |
| bool | setRefSpeeds (const double *spds) override |
| | Set reference speed on all joints. More...
|
| |
| bool | setRefSpeeds (const int n_joints, const int *joints, const double *spds) override |
| | Set reference speed on all joints. More...
|
| |
| bool | setRefAcceleration (int j, double acc) override |
| | Set reference acceleration for a joint. More...
|
| |
| bool | setRefAccelerations (const double *accs) override |
| | Set reference acceleration on all joints. More...
|
| |
| bool | setRefAccelerations (const int n_joints, const int *joints, const double *accs) override |
| | Set reference acceleration on all joints. More...
|
| |
| bool | getRefSpeed (int j, double *ref) override |
| | Get reference speed for a joint. More...
|
| |
| bool | getRefSpeeds (double *spds) override |
| | Get reference speed of all joints. More...
|
| |
| bool | getRefSpeeds (const int n_joints, const int *joints, double *spds) override |
| | Get reference speed of all joints. More...
|
| |
| bool | getRefAcceleration (int j, double *acc) override |
| | Get reference acceleration for a joint. More...
|
| |
| bool | getRefAccelerations (double *accs) override |
| | Get reference acceleration of all joints. More...
|
| |
| bool | getRefAccelerations (const int n_joints, const int *joints, double *accs) override |
| | Get reference acceleration for a joint. More...
|
| |
| bool | stop (int j) override |
| | Stop motion, single joint. More...
|
| |
| bool | stop () override |
| | Stop motion, multiple joints. More...
|
| |
| bool | stop (const int n_joints, const int *joints) override |
| | Stop motion for subset of joints. More...
|
| |
| bool | velocityMove (int j, double v) override |
| | Start motion at a given speed, single joint. More...
|
| |
| bool | velocityMove (const double *v) override |
| | Start motion at a given speed, multiple joints. More...
|
| |
| bool | resetEncoder (int j) override |
| | Reset encoder, single joint. More...
|
| |
| bool | resetEncoders () override |
| | Reset encoders. More...
|
| |
| bool | setEncoder (int j, double val) override |
| | Set the value of the encoder for a given joint. More...
|
| |
| bool | setEncoders (const double *vals) override |
| | Set the value of all encoders. More...
|
| |
| bool | getEncoder (int j, double *v) override |
| | Read the value of an encoder. More...
|
| |
| bool | getEncoders (double *encs) override |
| | Read the position of all axes. More...
|
| |
| bool | getEncodersTimed (double *encs, double *t) override |
| | Read the instantaneous acceleration of all axes. More...
|
| |
| bool | getEncoderTimed (int j, double *v, double *t) override |
| | Read the instantaneous acceleration of all axes. More...
|
| |
| bool | getEncoderSpeed (int j, double *sp) override |
| | Read the istantaneous speed of an axis. More...
|
| |
| bool | getEncoderSpeeds (double *spds) override |
| | Read the instantaneous speed of all axes. More...
|
| |
| bool | getEncoderAcceleration (int j, double *acc) override |
| | Read the instantaneous acceleration of an axis. More...
|
| |
| bool | getEncoderAccelerations (double *accs) override |
| | Read the instantaneous acceleration of all axes. More...
|
| |
| bool | getNumberOfMotorEncoders (int *num) override |
| | Get the number of available motor encoders. More...
|
| |
| bool | resetMotorEncoder (int m) override |
| | Reset motor encoder, single motor. More...
|
| |
| bool | resetMotorEncoders () override |
| | Reset motor encoders. More...
|
| |
| bool | setMotorEncoderCountsPerRevolution (int m, const double cpr) override |
| | Sets number of counts per revolution for motor encoder m. More...
|
| |
| bool | getMotorEncoderCountsPerRevolution (int m, double *cpr) override |
| | Gets number of counts per revolution for motor encoder m. More...
|
| |
| bool | setMotorEncoder (int m, const double val) override |
| | Set the value of the motor encoder for a given motor. More...
|
| |
| bool | setMotorEncoders (const double *vals) override |
| | Set the value of all motor encoders. More...
|
| |
| bool | getMotorEncoder (int m, double *v) override |
| | Read the value of a motor encoder. More...
|
| |
| bool | getMotorEncoders (double *encs) override |
| | Read the position of all motor encoders. More...
|
| |
| bool | getMotorEncodersTimed (double *encs, double *t) override |
| | Read the instantaneous position of all motor encoders. More...
|
| |
| bool | getMotorEncoderTimed (int m, double *v, double *t) override |
| | Read the instantaneous position of a motor encoder. More...
|
| |
| bool | getMotorEncoderSpeed (int m, double *sp) override |
| | Read the istantaneous speed of a motor encoder. More...
|
| |
| bool | getMotorEncoderSpeeds (double *spds) override |
| | Read the instantaneous speed of all motor encoders. More...
|
| |
| bool | getMotorEncoderAcceleration (int m, double *acc) override |
| | Read the instantaneous acceleration of a motor encoder. More...
|
| |
| bool | getMotorEncoderAccelerations (double *accs) override |
| | Read the instantaneous acceleration of all motor encoders. More...
|
| |
| bool | enableAmp (int j) override |
| | Enable the amplifier on a specific joint. More...
|
| |
| bool | disableAmp (int j) override |
| | Disable the amplifier on a specific joint. More...
|
| |
| bool | getAmpStatus (int *st) override |
| |
| bool | getAmpStatus (int j, int *v) override |
| |
| bool | setMaxCurrent (int j, double v) override |
| |
| bool | getMaxCurrent (int j, double *v) override |
| | Returns the maximum electric current allowed for a given motor. More...
|
| |
| bool | getNominalCurrent (int m, double *val) override |
| |
| bool | setNominalCurrent (int m, const double val) override |
| |
| bool | getPeakCurrent (int m, double *val) override |
| |
| bool | setPeakCurrent (int m, const double val) override |
| |
| bool | getPWM (int m, double *val) override |
| |
| bool | getPWMLimit (int m, double *val) override |
| |
| bool | setPWMLimit (int m, const double val) override |
| |
| bool | getPowerSupplyVoltage (int m, double *val) override |
| |
| bool | setLimits (int j, double min, double max) override |
| | Set the software limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More...
|
| |
| bool | getLimits (int j, double *min, double *max) override |
| | Get the software limits for a particular axis. More...
|
| |
| bool | setVelLimits (int j, double min, double max) override |
| | Set the software speed limits for a particular axis, the behavior of the control card when these limits are exceeded, depends on the implementation. More...
|
| |
| bool | getVelLimits (int j, double *min, double *max) override |
| | Get the software speed limits for a particular axis. More...
|
| |
| bool | getRemoteVariable (std::string key, yarp::os::Bottle &val) override |
| |
| bool | setRemoteVariable (std::string key, const yarp::os::Bottle &val) override |
| |
| bool | getRemoteVariablesList (yarp::os::Bottle *listOfKeys) override |
| |
| bool | isCalibratorDevicePresent (bool *isCalib) override |
| | isCalibratorDevicePresent: check if a calibrator device has been set More...
|
| |
| yarp::dev::IRemoteCalibrator * | getCalibratorDevice () override |
| | getCalibratorDevice: return the pointer stored with the setCalibratorDevice More...
|
| |
| bool | calibrateSingleJoint (int j) override |
| | calibrateSingleJoint: call the calibration procedure for the single joint More...
|
| |
| bool | calibrateWholePart () override |
| | calibrateWholePart: call the procedure for calibrating the whole device More...
|
| |
| bool | homingSingleJoint (int j) override |
| | homingSingleJoint: call the homing procedure for a single joint More...
|
| |
| bool | homingWholePart () override |
| | homingWholePart: call the homing procedure for a the whole part/device More...
|
| |
| bool | parkSingleJoint (int j, bool _wait=true) override |
| | parkSingleJoint(): start the parking procedure for the single joint More...
|
| |
| bool | parkWholePart () override |
| | parkWholePart: start the parking procedure for the whole part More...
|
| |
| bool | quitCalibrate () override |
| | quitCalibrate: interrupt the calibration procedure More...
|
| |
| bool | quitPark () override |
| | quitPark: interrupt the park procedure More...
|
| |
| bool | calibrateAxisWithParams (int j, unsigned int ui, double v1, double v2, double v3) override |
| | Start calibration, this method is very often platform specific. More...
|
| |
| bool | setCalibrationParameters (int j, const yarp::dev::CalibrationParameters ¶ms) override |
| | Start calibration, this method is very often platform specific. More...
|
| |
| bool | calibrationDone (int j) override |
| | Check if the calibration is terminated, on a particular joint. More...
|
| |
| bool | abortPark () override |
| |
| bool | abortCalibration () override |
| |
| bool | getNumberOfMotors (int *num) override |
| | Retrieves the number of controlled axes from the current physical interface. More...
|
| |
| bool | getTemperature (int m, double *val) override |
| | Get temperature of a motor. More...
|
| |
| bool | getTemperatures (double *vals) override |
| | Get temperature of all the motors. More...
|
| |
| bool | getTemperatureLimit (int m, double *val) override |
| | Retreives the current temperature limit for a specific motor. More...
|
| |
| bool | setTemperatureLimit (int m, const double val) override |
| | Set the temperature limit for a specific motor. More...
|
| |
| bool | getGearboxRatio (int m, double *val) override |
| | Get the gearbox ratio for a specific motor. More...
|
| |
| bool | setGearboxRatio (int m, const double val) override |
| | Set the gearbox ratio for a specific motor. More...
|
| |
| bool | getAxisName (int j, std::string &name) override |
| |
| bool | getJointType (int j, yarp::dev::JointTypeEnum &type) override |
| |
| bool | getRefTorques (double *refs) override |
| | Get the reference value of the torque for all joints. More...
|
| |
| bool | getRefTorque (int j, double *t) override |
| | Get the reference value of the torque for a given joint. More...
|
| |
| bool | setRefTorques (const double *t) override |
| | Set the reference value of the torque for all joints. More...
|
| |
| bool | setRefTorque (int j, double t) override |
| | Set the reference value of the torque for a given joint. More...
|
| |
| bool | setRefTorques (const int n_joint, const int *joints, const double *t) override |
| | Set new torque reference for a subset of joints. More...
|
| |
| bool | getMotorTorqueParams (int j, yarp::dev::MotorTorqueParameters *params) override |
| | Get a subset of motor parameters (bemf, ktau etc) useful for torque control. More...
|
| |
| bool | setMotorTorqueParams (int j, const yarp::dev::MotorTorqueParameters params) override |
| | Set a subset of motor parameters (bemf, ktau etc) useful for torque control. More...
|
| |
| bool | setImpedance (int j, double stiff, double damp) override |
| | Set current impedance gains (stiffness,damping) for a specific joint. More...
|
| |
| bool | setImpedanceOffset (int j, double offset) override |
| | Set current force Offset for a specific joint. More...
|
| |
| bool | getTorque (int j, double *t) override |
| | Get the value of the torque on a given joint (this is the feedback if you have a torque sensor). More...
|
| |
| bool | getTorques (double *t) override |
| | Get the value of the torque for all joints (this is the feedback if you have torque sensors). More...
|
| |
| bool | getTorqueRange (int j, double *min, double *max) override |
| | Get the full scale of the torque sensor of a given joint. More...
|
| |
| bool | getTorqueRanges (double *min, double *max) override |
| | Get the full scale of the torque sensors of all joints. More...
|
| |
| bool | getImpedance (int j, double *stiff, double *damp) override |
| | Get current impedance gains (stiffness,damping,offset) for a specific joint. More...
|
| |
| bool | getImpedanceOffset (int j, double *offset) override |
| | Get current force Offset for a specific joint. More...
|
| |
| bool | getCurrentImpedanceLimit (int j, double *min_stiff, double *max_stiff, double *min_damp, double *max_damp) override |
| | Get the current impedandance limits for a specific joint. More...
|
| |
| bool | getControlMode (int j, int *mode) override |
| | Get the current control mode. More...
|
| |
| bool | getControlModes (int *modes) override |
| | Get the current control mode (multiple joints). More...
|
| |
| bool | getControlModes (const int n_joint, const int *joints, int *modes) override |
| | Get the current control mode for a subset of axes. More...
|
| |
| bool | setControlMode (const int j, const int mode) override |
| | Set the current control mode. More...
|
| |
| bool | setControlModes (const int n_joints, const int *joints, int *modes) override |
| | Set the current control mode for a subset of axes. More...
|
| |
| bool | setControlModes (int *modes) override |
| | Set the current control mode (multiple joints). More...
|
| |
| bool | setPosition (int j, double ref) override |
| | Set new position for a single axis. More...
|
| |
| bool | setPositions (const int n_joints, const int *joints, const double *dpos) override |
| | Set new reference point for all axes. More...
|
| |
| bool | setPositions (const double *refs) override |
| | Set new position for a set of axis. More...
|
| |
| bool | getRefPosition (const int joint, double *ref) override |
| | Get the last position reference for the specified axis. More...
|
| |
| bool | getRefPositions (double *refs) override |
| | Get the last position reference for all axes. More...
|
| |
| bool | getRefPositions (const int n_joint, const int *joints, double *refs) override |
| | Get the last position reference for the specified group of axes. More...
|
| |
| yarp::os::Stamp | getLastInputStamp () override |
| | Return the time stamp relative to the last acquisition. More...
|
| |
| bool | velocityMove (const int n_joints, const int *joints, const double *spds) override |
| | Start motion at a given speed for a subset of joints. More...
|
| |
| bool | getRefVelocity (const int joint, double *vel) override |
| | Get the last reference speed set by velocityMove for single joint. More...
|
| |
| bool | getRefVelocities (double *vels) override |
| | Get the last reference speed set by velocityMove for all joints. More...
|
| |
| bool | getRefVelocities (const int n_joint, const int *joints, double *vels) override |
| | Get the last reference speed set by velocityMove for a group of joints. More...
|
| |
| bool | getInteractionMode (int j, yarp::dev::InteractionModeEnum *mode) override |
| | Get the current interaction mode of the robot, values can be stiff or compliant. More...
|
| |
| bool | getInteractionModes (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| | Get the current interaction mode of the robot for a set of joints, values can be stiff or compliant. More...
|
| |
| bool | getInteractionModes (yarp::dev::InteractionModeEnum *modes) override |
| | Get the current interaction mode of the robot for a all the joints, values can be stiff or compliant. More...
|
| |
| bool | setInteractionMode (int j, yarp::dev::InteractionModeEnum mode) override |
| | Set the interaction mode of the robot, values can be stiff or compliant. More...
|
| |
| bool | setInteractionModes (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| | Set the interaction mode of the robot for a set of joints, values can be stiff or compliant. More...
|
| |
| bool | setInteractionModes (yarp::dev::InteractionModeEnum *modes) override |
| | Set the interaction mode of the robot for a all the joints, values can be stiff or compliant. More...
|
| |
| bool | setRefDutyCycle (int m, double ref) override |
| | Sets the reference dutycycle to a single motor. More...
|
| |
| bool | setRefDutyCycles (const double *refs) override |
| | Sets the reference dutycycle for all the motors. More...
|
| |
| bool | getRefDutyCycle (int m, double *ref) override |
| | Gets the last reference sent using the setRefDutyCycle function. More...
|
| |
| bool | getRefDutyCycles (double *refs) override |
| | Gets the last reference sent using the setRefDutyCycles function. More...
|
| |
| bool | getDutyCycle (int m, double *val) override |
| | Gets the current dutycycle of the output of the amplifier (i.e. More...
|
| |
| bool | getDutyCycles (double *vals) override |
| | Gets the current dutycycle of the output of the amplifier (i.e. More...
|
| |
| bool | getCurrent (int m, double *curr) override |
| |
| bool | getCurrents (double *currs) override |
| |
| bool | getCurrentRange (int m, double *min, double *max) override |
| | Get the full scale of the current measurement for a given motor (e.g. More...
|
| |
| bool | getCurrentRanges (double *min, double *max) override |
| | Get the full scale of the current measurements for all motors motor (e.g. More...
|
| |
| bool | setRefCurrents (const double *currs) override |
| | Set the reference value of the currents for all motors. More...
|
| |
| bool | setRefCurrent (int m, double curr) override |
| | Set the reference value of the current for a single motor. More...
|
| |
| bool | setRefCurrents (const int n_motor, const int *motors, const double *currs) override |
| | Set the reference value of the current for a group of motors. More...
|
| |
| bool | getRefCurrents (double *currs) override |
| | Get the reference value of the currents for all motors. More...
|
| |
| bool | getRefCurrent (int m, double *curr) override |
| | Get the reference value of the current for a single motor. More...
|
| |
| | ~DeviceDriver () override=default |
| | Destructor. More...
|
| |
| template<class T > |
| bool | view (T *&x) |
| | Get an interface to the device driver. More...
|
| |
| virtual DeviceDriver * | getImplementation () |
| | Some drivers are bureaucrats, pointing at others. More...
|
| |
| virtual | ~IConfig () |
| | Destructor. More...
|
| |
| virtual bool | configure (Searchable &config) |
| | Change online parameters. More...
|
| |
| virtual | ~IPidControl () |
| | Destructor. More...
|
| |
| virtual | ~IPositionControl () |
| | Destructor. More...
|
| |
| virtual | ~IPositionDirect () |
| | Destructor. More...
|
| |
| virtual | ~IVelocityControl () |
| | Destructor. More...
|
| |
| virtual | ~IPWMControl () |
| |
| virtual | ~ICurrentControl () |
| | Destructor. More...
|
| |
| virtual | ~IEncodersTimed () |
| | Destructor. More...
|
| |
| virtual | ~IEncoders () |
| | Destructor. More...
|
| |
| virtual | ~IMotor () |
| | Destructor. More...
|
| |
| virtual | ~IMotorEncoders () |
| | Destructor. More...
|
| |
| virtual | ~IAmplifierControl () |
| | Destructor. More...
|
| |
| virtual | ~IControlLimits () |
| | Destructor. More...
|
| |
| | IRemoteCalibrator () |
| | This interface is meant to remotize the access of the calibration device in order to allow users to remotely call the calibration procedure for a single joint or the whole device and let the calibrator do the job. More...
|
| |
| virtual | ~IRemoteCalibrator ()=default |
| |
| virtual bool | setCalibratorDevice (yarp::dev::IRemoteCalibrator *dev) |
| | setCalibratorDevice: store the pointer to the calibrator device. More...
|
| |
| virtual void | releaseCalibratorDevice () |
| | releaseCalibratorDevice: reset the internal pointer to NULL when stop using the calibrator More...
|
| |
| | IControlCalibration () |
| |
| virtual | ~IControlCalibration () |
| | Destructor. More...
|
| |
| virtual bool | setCalibrator (ICalibrator *c) |
| | Set the calibrator object to be used to calibrate the robot. More...
|
| |
| virtual bool | calibrateRobot () |
| | Calibrate robot by using an external calibrator. More...
|
| |
| virtual bool | park (bool wait=true) |
| |
| virtual | ~ITorqueControl () |
| | Destructor. More...
|
| |
| virtual | ~IImpedanceControl () |
| | Destructor. More...
|
| |
| virtual | ~IControlMode () |
| |
| virtual | ~IMultipleWrapper () |
| | Destructor. More...
|
| |
| virtual | ~IAxisInfo () |
| | Destructor. More...
|
| |
| virtual | ~IPreciselyTimed () |
| |
| virtual | ~IInteractionMode () |
| | Destructor. More...
|
| |
| virtual | ~IRemoteVariables () |
| | Destructor. More...
|
| |



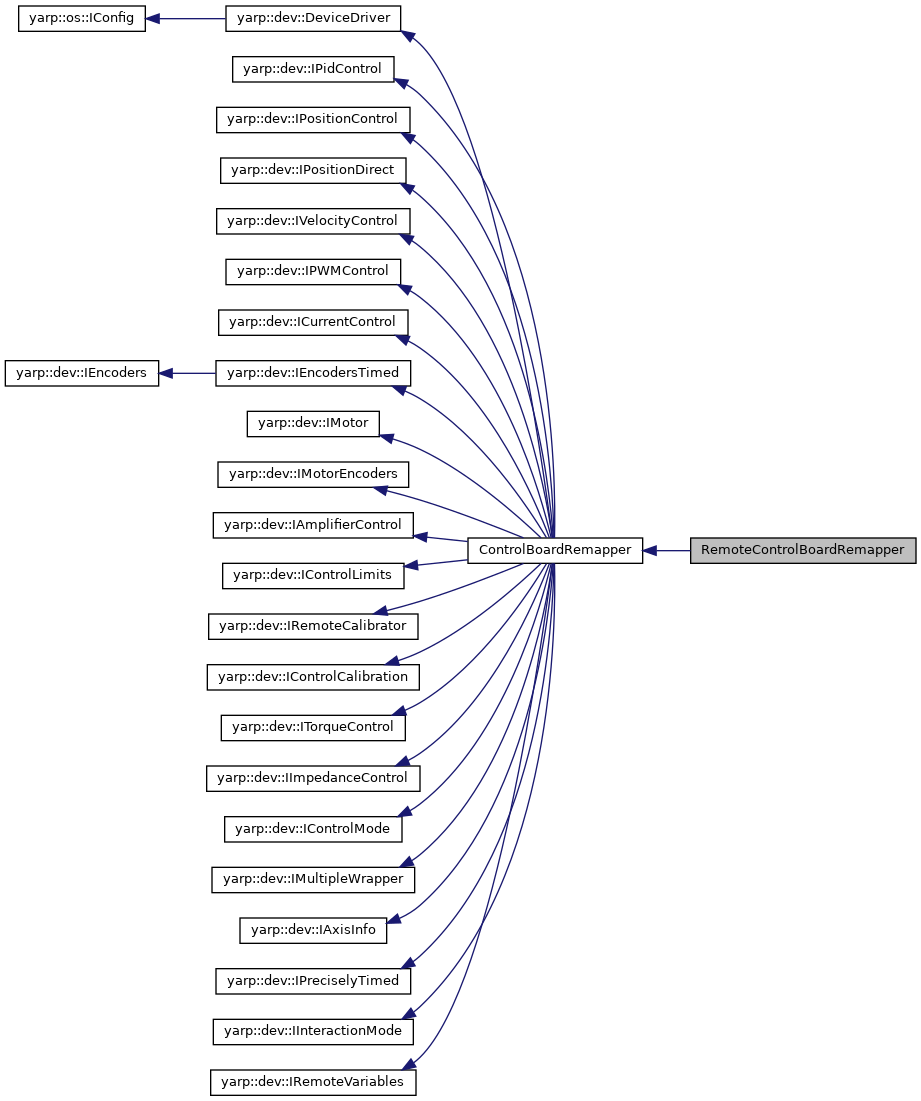
 Inheritance diagram for RemoteControlBoardRemapper:
Inheritance diagram for RemoteControlBoardRemapper: