|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
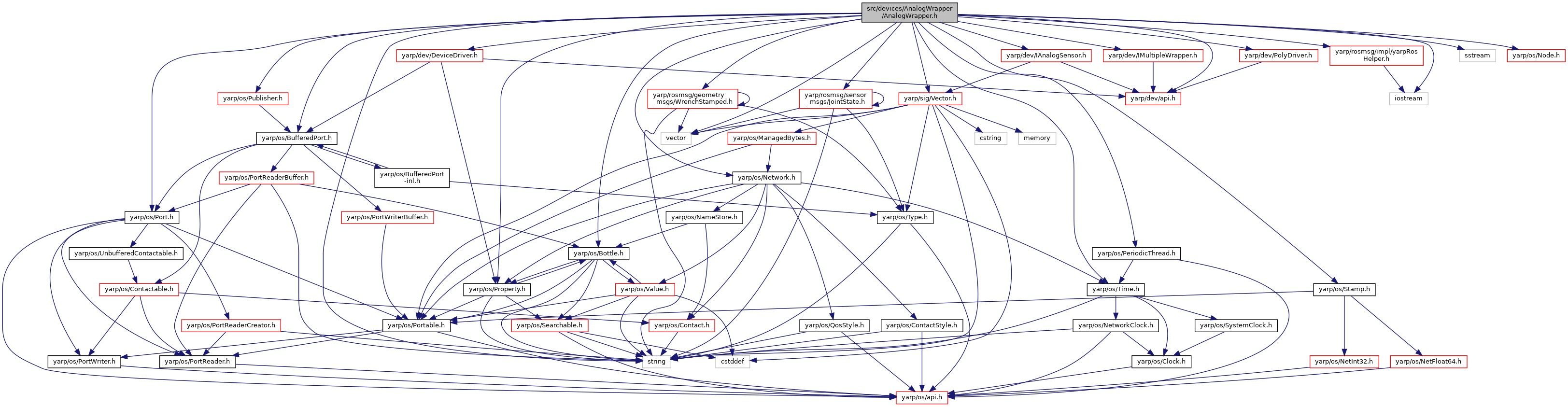
#include <vector>#include <iostream>#include <string>#include <sstream>#include <yarp/os/Network.h>#include <yarp/os/Port.h>#include <yarp/os/BufferedPort.h>#include <yarp/os/Bottle.h>#include <yarp/os/Time.h>#include <yarp/os/Property.h>#include <yarp/os/PeriodicThread.h>#include <yarp/os/Stamp.h>#include <yarp/sig/Vector.h>#include <yarp/dev/IAnalogSensor.h>#include <yarp/dev/PolyDriver.h>#include <yarp/dev/DeviceDriver.h>#include <yarp/dev/IMultipleWrapper.h>#include <yarp/dev/api.h>#include <yarp/os/Node.h>#include <yarp/os/Publisher.h>#include <yarp/rosmsg/geometry_msgs/WrenchStamped.h>#include <yarp/rosmsg/sensor_msgs/JointState.h>#include <yarp/rosmsg/impl/yarpRosHelper.h> Include dependency graph for AnalogWrapper.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for AnalogWrapper.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | AnalogWrapper |
analogServer: Device that expose an AnalogSensor (using the IAnalogSensor interface) on the YARP or ROS network. More... | |
Macros | |
| #define | DEFAULT_THREAD_PERIOD 20 |
| #define DEFAULT_THREAD_PERIOD 20 |
Definition at line 45 of file AnalogWrapper.h.