|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
analogServer: Device that expose an AnalogSensor (using the IAnalogSensor interface) on the YARP or ROS network.
More...
#include <AnalogWrapper/AnalogWrapper.h>
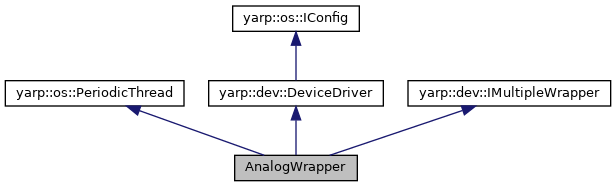
 Inheritance diagram for AnalogWrapper:
Inheritance diagram for AnalogWrapper:Public Member Functions | |
| AnalogWrapper () | |
| AnalogWrapper (const AnalogWrapper &)=delete | |
| AnalogWrapper (AnalogWrapper &&)=delete | |
| AnalogWrapper & | operator= (const AnalogWrapper &)=delete |
| AnalogWrapper & | operator= (AnalogWrapper &&)=delete |
| ~AnalogWrapper () override | |
| bool | open (yarp::os::Searchable ¶ms) override |
| Open the DeviceDriver. More... | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| yarp::os::Bottle | getOptions () |
| void | setId (const std::string &id) |
| std::string | getId () |
| bool | attachAll (const yarp::dev::PolyDriverList &p) override |
| Specify which analog sensor this thread has to read from. More... | |
| bool | detachAll () override |
| Detach the object (you must have first called attach). More... | |
| void | attach (yarp::dev::IAnalogSensor *s) |
| void | detach () |
| bool | threadInit () override |
| Initialization method. More... | |
| void | threadRelease () override |
| Release method. More... | |
| void | run () override |
| Loop function. More... | |
| Public Member Functions inherited from yarp::os::PeriodicThread | |
| PeriodicThread (double period, ShouldUseSystemClock useSystemClock=ShouldUseSystemClock::No) | |
| Constructor. More... | |
| virtual | ~PeriodicThread () |
| bool | start () |
| Call this to start the thread. More... | |
| void | step () |
| Call this to "step" the thread rather than starting it. More... | |
| void | stop () |
| Call this to stop the thread, this call blocks until the thread is terminated (and releaseThread() called). More... | |
| void | askToStop () |
| Stop the thread. More... | |
| bool | isRunning () const |
| Returns true when the thread is started, false otherwise. More... | |
| bool | isSuspended () const |
| Returns true when the thread is suspended, false otherwise. More... | |
| bool | setPeriod (double period) |
| Set the (new) period of the thread. More... | |
| double | getPeriod () const |
| Return the current period of the thread. More... | |
| void | suspend () |
| Suspend the thread, the thread keeps running by doLoop is never executed. More... | |
| void | resume () |
| Resume the thread if previously suspended. More... | |
| void | resetStat () |
| Reset thread statistics. More... | |
| double | getEstimatedPeriod () const |
| Return estimated period since last reset. More... | |
| void | getEstimatedPeriod (double &av, double &std) const |
| Return estimated period since last reset. More... | |
| unsigned int | getIterations () const |
| Return the number of iterations performed since last reset. More... | |
| double | getEstimatedUsed () const |
| Return the estimated duration of the run() function since last reset. More... | |
| void | getEstimatedUsed (double &av, double &std) const |
| Return estimated duration of the run() function since last reset. More... | |
| int | setPriority (int priority, int policy=-1) |
| Set the priority and scheduling policy of the thread, if the OS supports that. More... | |
| int | getPriority () const |
| Query the current priority of the thread, if the OS supports that. More... | |
| int | getPolicy () const |
| Query the current scheduling policy of the thread, if the OS supports that. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::IMultipleWrapper | |
| virtual | ~IMultipleWrapper () |
| Destructor. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from yarp::os::PeriodicThread | |
| virtual void | beforeStart () |
| Called just before a new thread starts. More... | |
| virtual void | afterStart (bool success) |
| Called just after a new thread starts (or fails to start), this is executed by the same thread that calls start(). More... | |
analogServer: Device that expose an AnalogSensor (using the IAnalogSensor interface) on the YARP or ROS network.
It reads the data from an analog sensor and sends them on one or more ports. It creates one rpc port and its related handler for every output port..
Parameters required by this device are:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| name | - | string | - | - | Yes | full name of the port opened by the device, like /robotName/part/ | MUST start with a '/' character |
| period | - | int | ms | 20 | No | refresh period of the broadcasted values in ms | optional, default 20ms |
| subdevice | - | string | - | - | alternative to netwok group | name of the subdevice to instantiate | when used, parameters for the subdevice must be provided as well |
| ports | - | group | - | - | alternative to subdevice | this is expected to be a group parameter in xml format, a list in .ini file format. SubParameter are mandatory if this is used | - |
| - | portName_1 | 4 * int | channel number | - | if ports is used | describe how to match subdevice_1 channels with the wrapper channels. First 2 numbers indicate first/last wrapper channel, last 2 numbers are subdevice first/last channel | The channels are intended to be consequent |
| - | ... | 4 * int | channel number | - | if ports is used | same as above | The channels are intended to be consequent |
| - | portName_n | 4 * int | channel number | - | if ports is used | same as above | The channels are intended to be consequent |
| - | channels | int | - | - | if ports is used | total number of channels handled by the wrapper | MUST match the sum of channels from all the ports |
| ROS | - | group | - | - | No | Group containing parameter for ROS topic initialization | if missing, it is assumed to not use ROS topics |
| - | useROS | string | true/false/only | - | if ROS group is present | set 'true' to have both yarp ports and ROS topic, set 'only' to have only ROS topic and no yarp port | - |
| - | ROS_topicName | string | - | - | if ROS group is present | set the name for ROS topic | must start with a leading '/' |
| - | list | - | - | set the names for ROS topics as a List | all names must start with a leading '/' | ||
| - | ROS_nodeName | string | - | - | if ROS group is present | set the name for ROS node | must start with a leading '/' |
| - | channelNames | string | - | - | deprecated | channels names are now got from attached motionControl device | names order must match with the channel order, from 0 to N |
ROS message type used for force/torque is geometry_msgs/WrenchedStamped.msg (http://docs.ros.org/indigo/api/geometry_msgs/html/msg/WrenchStamped.html) ROS Offset and padding are optional parameters to be used to ignore the data surrounding force/torque data present in the analog sensor output.
for example: 3forces + 3torques + temperature + 3forces + 3torques + temperature ... -> offset 0, padding 1 (the temperature entry is one sample to skip) 3forces + 3torques + temperature + gravity + 3forces + 3torques + temperature + gravity ... -> offset 0, padding is 4 (1 temperature + 3 for gravity) temperature + 3forces + 3torques + temperature + 3forces + 3torques ... -> offset 1, padding is 0 (the F/T are the last ones) temperature + 3forces + 3torques + gravity + temperature + 3forces + 3torques + gravity ... -> offset 1, padding is 3 (skip 1 sample, get F/T and skip remaining 3)
Some example of configuration files:
Configuration file using .ini format, using subdevice keyword.
Configuration file using .ini format, using ports keyword
Configuration file using .xml format.
Configuration for ROS topic using .ini format.
Configuration for ROS topic using .xml format.
Configuration for ROS topic using .xml format.
Definition at line 187 of file AnalogWrapper.h.
| AnalogWrapper::AnalogWrapper | ( | ) |
Definition at line 216 of file AnalogWrapper.cpp.
|
delete |
|
delete |
|
override |
Definition at line 228 of file AnalogWrapper.cpp.
| void AnalogWrapper::attach | ( | yarp::dev::IAnalogSensor * | s | ) |
Definition at line 359 of file AnalogWrapper.cpp.
|
overridevirtual |
Specify which analog sensor this thread has to read from.
Implements yarp::dev::IMultipleWrapper.
Definition at line 315 of file AnalogWrapper.cpp.
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 991 of file AnalogWrapper.cpp.
| void AnalogWrapper::detach | ( | ) |
Definition at line 371 of file AnalogWrapper.cpp.
|
overridevirtual |
Detach the object (you must have first called attach).
Implements yarp::dev::IMultipleWrapper.
Definition at line 344 of file AnalogWrapper.cpp.
| std::string AnalogWrapper::getId | ( | ) |
Definition at line 400 of file AnalogWrapper.cpp.
| yarp::os::Bottle AnalogWrapper::getOptions | ( | ) |
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. See device invocation examples. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 695 of file AnalogWrapper.cpp.
|
delete |
|
delete |
|
overridevirtual |
Loop function.
This is the thread itself. The thread calls the run() function every <period> ms. At the end of each run, the thread will sleep the amounth of time required, taking into account the time spent inside the loop function. Example: requested period is 10ms, the run() function take 3ms to be executed, the thread will sleep for 7ms.
Note: after each run is completed, the thread will call a yield() in order to facilitate other threads to run.
Implements yarp::os::PeriodicThread.
Definition at line 875 of file AnalogWrapper.cpp.
| void AnalogWrapper::setId | ( | const std::string & | id | ) |
Definition at line 395 of file AnalogWrapper.cpp.
|
overridevirtual |
Initialization method.
The thread executes this function when it starts and before "run". This is a good place to perform initialization tasks that need to be done by the thread itself (device drivers initialization, memory allocation etc). If the function returns false the thread quits and never calls "run". The return value of threadInit() is notified to the class and passed as a parameter to afterStart(). Note that afterStart() is called by the same thread that is executing the "start" method.
Reimplemented from yarp::os::PeriodicThread.
Definition at line 381 of file AnalogWrapper.cpp.
|
overridevirtual |
Release method.
The thread executes this function once when it exits, after the last "run". This is a good place to release resources that were initialized in threadInit() (release memory, and device driver resources).
Reimplemented from yarp::os::PeriodicThread.
Definition at line 866 of file AnalogWrapper.cpp.