|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
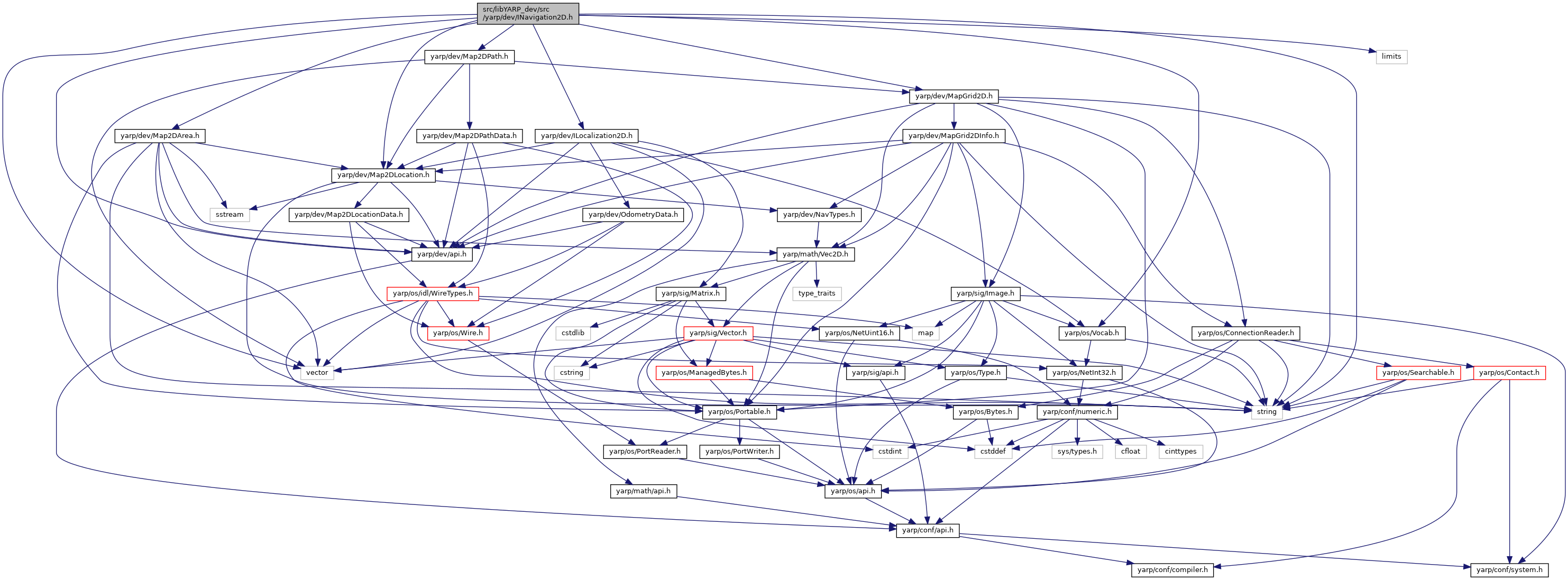
#include <yarp/os/Vocab.h>#include <yarp/dev/api.h>#include <yarp/dev/ILocalization2D.h>#include <yarp/dev/Map2DLocation.h>#include <yarp/dev/Map2DPath.h>#include <yarp/dev/Map2DArea.h>#include <yarp/dev/MapGrid2D.h>#include <vector>#include <limits>#include <string> Include dependency graph for INavigation2D.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for INavigation2D.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | yarp::dev::Nav2D::INavigation2DTargetActions |
| class | yarp::dev::Nav2D::INavigation2DControlActions |
| class | yarp::dev::Nav2D::INavigation2D |
| An interface to control the navigation of a mobile robot in a 2D environment. More... | |
Namespaces | |
| yarp | |
| The main, catch-all namespace for YARP. | |
| yarp::dev | |
| An interface for the device drivers. | |
| yarp::dev::Nav2D | |
| yarp::dev::Nav2D::INavigation2DHelpers | |
Functions | |
| NavigationStatusEnum | yarp::dev::Nav2D::INavigation2DHelpers::stringToStatus (std::string s) |
| std::string | yarp::dev::Nav2D::INavigation2DHelpers::statusToString (NavigationStatusEnum status) |
Variables | |
| constexpr yarp::conf::vocab32_t | VOCAB_NAV_STOP = yarp::os::createVocab('s', 't', 'o', 'p') |
| constexpr yarp::conf::vocab32_t | VOCAB_NAV_SUSPEND = yarp::os::createVocab('s', 'u', 's', 'p') |
| constexpr yarp::conf::vocab32_t | VOCAB_NAV_RESUME = yarp::os::createVocab('r', 'e', 's', 'm') |
| constexpr yarp::conf::vocab32_t | VOCAB_NAV_GET_NAVIGATION_WAYPOINTS = yarp::os::createVocab('w', 'a', 'y', 's') |
| constexpr yarp::conf::vocab32_t | VOCAB_NAV_GET_CURRENT_WAYPOINT = yarp::os::createVocab('w', 'a', 'y') |
| constexpr yarp::conf::vocab32_t | VOCAB_NAV_GET_NAV_MAP = yarp::os::createVocab('n', 'm', 'a', 'p') |
|
constexpr |
Definition at line 311 of file INavigation2D.h.
|
constexpr |
Definition at line 312 of file INavigation2D.h.
|
constexpr |
Definition at line 310 of file INavigation2D.h.
|
constexpr |
Definition at line 309 of file INavigation2D.h.
|
constexpr |
Definition at line 307 of file INavigation2D.h.
|
constexpr |
Definition at line 308 of file INavigation2D.h.