#include <yarp/dev/INavigation2D.h>
Definition at line 70 of file INavigation2D.h.
◆ ~INavigation2DTargetActions()
| virtual yarp::dev::Nav2D::INavigation2DTargetActions::~INavigation2DTargetActions |
( |
| ) |
|
|
inlinevirtual |
◆ applyVelocityCommand()
| virtual bool yarp::dev::Nav2D::INavigation2DTargetActions::applyVelocityCommand |
( |
double |
x_vel, |
|
|
double |
y_vel, |
|
|
double |
theta_vel, |
|
|
double |
timeout = 0.1 |
|
) |
| |
|
pure virtual |
Apply a velocity command.
velocities are expressed in the robot reference frame
- Parameters
-
| x | [m/s] |
| y | [m/s] |
| theta | [deg/s] |
| timeout | The velocity command expires after the specified amount of time (by default 0.1 seconds) |
- Returns
- true/false
Implemented in Navigation2DClient, and fakeNavigation.
◆ getAbsoluteLocationOfCurrentTarget()
Gets the last navigation target in the world reference frame.
- Parameters
-
| loc | the location of the robot |
- Returns
- true/false
Implemented in fakeNavigation, and Navigation2DClient.
◆ getRelativeLocationOfCurrentTarget()
| virtual bool yarp::dev::Nav2D::INavigation2DTargetActions::getRelativeLocationOfCurrentTarget |
( |
double & |
x, |
|
|
double & |
y, |
|
|
double & |
theta |
|
) |
| |
|
pure virtual |
◆ gotoTargetByAbsoluteLocation()
Ask the robot to reach a position defined in the world reference frame.
- Parameters
-
| loc | the location to be reached |
- Returns
- true/false
Implemented in Navigation2DClient, and fakeNavigation.
◆ gotoTargetByRelativeLocation() [1/2]
| virtual bool yarp::dev::Nav2D::INavigation2DTargetActions::gotoTargetByRelativeLocation |
( |
double |
x, |
|
|
double |
y |
|
) |
| |
|
pure virtual |
Ask the robot to reach a position defined in the robot reference frame.
The final orientation of the goal is unspecified.
- Parameters
-
- Returns
- true/false
Implemented in Navigation2DClient, and fakeNavigation.
◆ gotoTargetByRelativeLocation() [2/2]
| virtual bool yarp::dev::Nav2D::INavigation2DTargetActions::gotoTargetByRelativeLocation |
( |
double |
x, |
|
|
double |
y, |
|
|
double |
theta |
|
) |
| |
|
pure virtual |
The documentation for this class was generated from the following file:



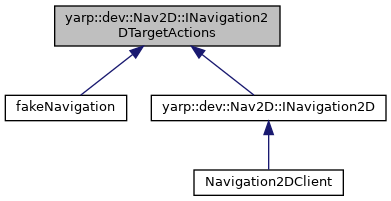
 Inheritance diagram for yarp::dev::Nav2D::INavigation2DTargetActions:
Inheritance diagram for yarp::dev::Nav2D::INavigation2DTargetActions: