|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
fakeNavigation: Documentation to be added
More...
#include <fakeNavigationDevice/fakeNavigationDev.h>
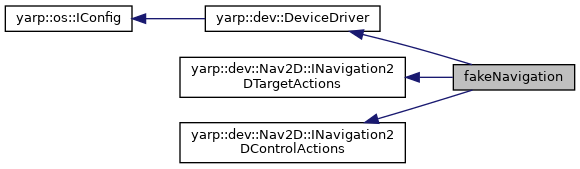
 Inheritance diagram for fakeNavigation:
Inheritance diagram for fakeNavigation:Public Member Functions | |
| virtual bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. More... | |
| fakeNavigation () | |
| virtual bool | close () override |
| Close the DeviceDriver. More... | |
| bool | gotoTargetByAbsoluteLocation (yarp::dev::Nav2D::Map2DLocation loc) override |
| Sets a new navigation target, expressed in the absolute (map) coordinate frame. More... | |
| bool | gotoTargetByRelativeLocation (double x, double y, double theta) override |
| //Sets a new relative target, expressed in local (robot) coordinate frame. More... | |
| bool | gotoTargetByRelativeLocation (double x, double y) override |
| //Sets a new relative target, expressed in local (robot) coordinate frame. More... | |
| bool | getAbsoluteLocationOfCurrentTarget (yarp::dev::Nav2D::Map2DLocation &target) override |
| //Gets the last target set through a setNewAbsTarget() command. More... | |
| bool | getRelativeLocationOfCurrentTarget (double &x, double &y, double &theta) override |
| //Gets the last target set through a setNewRelTarget command, expressed in absolute coordinates. More... | |
| bool | getNavigationStatus (yarp::dev::Nav2D::NavigationStatusEnum &status) override |
| //Gets the status of the current navigation task. More... | |
| bool | stopNavigation () override |
| //Stops the current navigation task. More... | |
| bool | suspendNavigation (double time) override |
| //Pauses the current navigation task. More... | |
| bool | resumeNavigation () override |
| //Resumes a previously paused navigation task. More... | |
| bool | getAllNavigationWaypoints (yarp::dev::Nav2D::TrajectoryTypeEnum trajectory_type, yarp::dev::Nav2D::Map2DPath &waypoints) override |
| Returns the list of waypoints generated by the navigation algorithm. More... | |
| bool | getCurrentNavigationWaypoint (yarp::dev::Nav2D::Map2DLocation &curr_waypoint) override |
| Returns the current waypoint pursued by the navigation algorithm. More... | |
| bool | getCurrentNavigationMap (yarp::dev::Nav2D::NavigationMapTypeEnum map_type, yarp::dev::Nav2D::MapGrid2D &map) override |
| Returns the current navigation map processed by the navigation algorithm. More... | |
| bool | recomputeCurrentNavigationPath () override |
| Forces the navigation system to recompute the path from the current robot position to the current goal. More... | |
| virtual bool | applyVelocityCommand (double x_vel, double y_vel, double theta_vel, double timeout=0.1) override |
| Apply a velocity command. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::Nav2D::INavigation2DTargetActions | |
| virtual | ~INavigation2DTargetActions () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::Nav2D::INavigation2DControlActions | |
| virtual | ~INavigation2DControlActions () |
| Destructor. More... | |
Public Attributes | |
| fakeNavigationThread * | navThread |
fakeNavigation: Documentation to be added
Definition at line 44 of file fakeNavigationDev.h.
| fakeNavigation::fakeNavigation | ( | ) |
Definition at line 74 of file fakeNavigationDev.cpp.
|
overridevirtual |
Apply a velocity command.
velocities are expressed in the robot reference frame
| x | [m/s] |
| y | [m/s] |
| theta | [deg/s] |
| timeout | The velocity command expires after the specified amount of time (by default 0.1 seconds) |
Implements yarp::dev::Nav2D::INavigation2DTargetActions.
Definition at line 107 of file fakeNavigationDev.cpp.
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 80 of file fakeNavigationDev.cpp.
|
overridevirtual |
//Gets the last target set through a setNewAbsTarget() command.
Implements yarp::dev::Nav2D::INavigation2DTargetActions.
Definition at line 155 of file fakeNavigationDev.cpp.
|
overridevirtual |
Returns the list of waypoints generated by the navigation algorithm.
| waypoints | the list of waypoints generated by the navigation algorithm |
Implements yarp::dev::Nav2D::INavigation2DControlActions.
Definition at line 131 of file fakeNavigationDev.cpp.
|
overridevirtual |
Returns the current navigation map processed by the navigation algorithm.
| map_type | the map to be requested (e.g. global, local, etc.) |
| map | the map, currently used by the navigation algorithm |
Implements yarp::dev::Nav2D::INavigation2DControlActions.
Definition at line 143 of file fakeNavigationDev.cpp.
|
overridevirtual |
Returns the current waypoint pursued by the navigation algorithm.
| curr_waypoint | the current waypoint pursued by the navigation algorithm |
Implements yarp::dev::Nav2D::INavigation2DControlActions.
Definition at line 137 of file fakeNavigationDev.cpp.
|
overridevirtual |
//Gets the status of the current navigation task.
Typically stored into navigation_status variable.
Implements yarp::dev::Nav2D::INavigation2DControlActions.
Definition at line 149 of file fakeNavigationDev.cpp.
|
overridevirtual |
//Gets the last target set through a setNewRelTarget command, expressed in absolute coordinates.
| a | Map2DLocation containing data of the current target. |
Implements yarp::dev::Nav2D::INavigation2DTargetActions.
Definition at line 167 of file fakeNavigationDev.cpp.
|
overridevirtual |
Sets a new navigation target, expressed in the absolute (map) coordinate frame.
| loc | the location to be reached |
Implements yarp::dev::Nav2D::INavigation2DTargetActions.
Definition at line 89 of file fakeNavigationDev.cpp.
|
overridevirtual |
//Sets a new relative target, expressed in local (robot) coordinate frame.
| v | a three-element vector (x,y,theta) representing the location to be reached |
Implements yarp::dev::Nav2D::INavigation2DTargetActions.
Definition at line 101 of file fakeNavigationDev.cpp.
|
overridevirtual |
//Sets a new relative target, expressed in local (robot) coordinate frame.
| v | a three-element vector (x,y,theta) representing the location to be reached |
Implements yarp::dev::Nav2D::INavigation2DTargetActions.
Definition at line 95 of file fakeNavigationDev.cpp.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. See device invocation examples. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 38 of file fakeNavigationDev.cpp.
|
overridevirtual |
Forces the navigation system to recompute the path from the current robot position to the current goal.
If no goal has been set, the command has no effect.
Implements yarp::dev::Nav2D::INavigation2DControlActions.
Definition at line 161 of file fakeNavigationDev.cpp.
|
overridevirtual |
//Resumes a previously paused navigation task.
Implements yarp::dev::Nav2D::INavigation2DControlActions.
Definition at line 125 of file fakeNavigationDev.cpp.
|
overridevirtual |
//Stops the current navigation task.
Implements yarp::dev::Nav2D::INavigation2DControlActions.
Definition at line 113 of file fakeNavigationDev.cpp.
|
overridevirtual |
//Pauses the current navigation task.
Implements yarp::dev::Nav2D::INavigation2DControlActions.
Definition at line 119 of file fakeNavigationDev.cpp.
| fakeNavigationThread* fakeNavigation::navThread |
Definition at line 50 of file fakeNavigationDev.h.