|
| enum | yarp::sig::PointCloudBasicType : std::int32_t {
yarp::sig::PC_XY_DATA = (1 << 0),
yarp::sig::PC_XYZ_DATA = (1 << 1),
yarp::sig::PC_RGBA_DATA = (1 << 2),
yarp::sig::PC_INTENSITY_DATA = (1 << 3),
yarp::sig::PC_INTEREST_DATA = (1 << 4),
yarp::sig::PC_NORMAL_DATA = (1 << 5),
yarp::sig::PC_CURVATURE_DATA = (1 << 6),
yarp::sig::PC_RANGE_DATA = (1 << 7),
yarp::sig::PC_VIEWPOINT_DATA = (1 << 8),
yarp::sig::PC_MOMENT_INV_DATA = (1 << 9),
yarp::sig::PC_RADII_RSD_DATA = (1 << 10),
yarp::sig::PC_BOUNDARY_DATA = (1 << 11),
yarp::sig::PC_PRINCIPAL_CURVATURE_DATA = (1 << 12),
yarp::sig::PC_PFH_SIGNAT_125_DATA = (1 << 13),
yarp::sig::PC_FPFH_SIGNAT_33_DATA = (1 << 14),
yarp::sig::PC_VFH_SIGNAT_308_DATA = (1 << 15),
yarp::sig::PC_NARF_36_DATA = (1 << 16),
yarp::sig::PC_BORDER_DATA = (1 << 17),
yarp::sig::PC_INTENSITY_GRAD_DATA = (1 << 18),
yarp::sig::PC_HISTOGRAM_DATA = (1 << 19),
yarp::sig::PC_SCALE_DATA = (1 << 20),
yarp::sig::PC_CONFIDENCE_DATA = (1 << 21),
yarp::sig::PC_RADIUS_DATA = (1 << 22),
yarp::sig::PC_USER_DEFINED = (1 << 23),
yarp::sig::PC_PADDING2 = (1 << 24),
yarp::sig::PC_PADDING3 = (1 << 25)
} |
| | The PointCloudBasicTypes enum. More...
|
| |
| enum | yarp::sig::PointCloudCompositeType : std::int32_t {
yarp::sig::PCL_POINT2D_XY = (PC_XY_DATA),
yarp::sig::PCL_POINT_XYZ = (PC_XYZ_DATA),
yarp::sig::PCL_POINT_XYZ_RGBA = (PC_XYZ_DATA | PC_RGBA_DATA | PC_PADDING3),
yarp::sig::PCL_POINT_XYZ_I = (PC_XYZ_DATA | PC_INTENSITY_DATA),
yarp::sig::PCL_INTEREST_POINT_XYZ = (PC_XYZ_DATA | PC_INTEREST_DATA),
yarp::sig::PCL_NORMAL = (PC_NORMAL_DATA | PC_CURVATURE_DATA | PC_PADDING3),
yarp::sig::PCL_POINT_XYZ_NORMAL = (PC_XYZ_DATA | PC_NORMAL_DATA | PC_CURVATURE_DATA | PC_PADDING3),
yarp::sig::PCL_POINT_XYZ_NORMAL_RGBA = (PC_XYZ_DATA | PC_RGBA_DATA | PC_NORMAL_DATA | PC_CURVATURE_DATA | PC_PADDING2),
yarp::sig::PCL_POINT_XYZ_I_NORMAL = (PC_XYZ_DATA | PC_INTENSITY_DATA | PC_NORMAL_DATA | PC_CURVATURE_DATA),
yarp::sig::PCL_POINT_XYZ_RANGE = (PC_XYZ_DATA | PC_RANGE_DATA),
yarp::sig::PCL_POINT_XYZ_VIEWPOINT = (PC_XYZ_DATA | PC_VIEWPOINT_DATA),
yarp::sig::PCL_MOMENT_INVARIANTS = (PC_MOMENT_INV_DATA),
yarp::sig::PCL_PRINCIPAL_RADII_RSD = (PC_RADII_RSD_DATA),
yarp::sig::PCL_BOUNDARY = (PC_BOUNDARY_DATA),
yarp::sig::PCL_PRINCIPAL_CURVATURES = (PC_PRINCIPAL_CURVATURE_DATA),
yarp::sig::PCL_PFH_SIGNAT_125 = (PC_PFH_SIGNAT_125_DATA),
yarp::sig::PCL_FPFH_SIGNAT_33 = (PC_FPFH_SIGNAT_33_DATA),
yarp::sig::PCL_VFH_SIGNAT_308 = (PC_VFH_SIGNAT_308_DATA),
yarp::sig::PCL_NARF_36 = (PC_NARF_36_DATA),
yarp::sig::PCL_POINT2D_BORDER = (PC_XY_DATA | PC_BORDER_DATA),
yarp::sig::PCL_INTENSITY_GRADIENT = (PC_INTENSITY_GRAD_DATA),
yarp::sig::PCL_PC_HISTOGRAM_N = (PC_HISTOGRAM_DATA),
yarp::sig::PCL_POINT_XYZ_SCALE = (PC_XYZ_DATA | PC_SCALE_DATA),
yarp::sig::PCL_POINT_XYZ_SURFEL = (PC_XYZ_DATA | PC_RGBA_DATA | PC_NORMAL_DATA | PC_RADIUS_DATA | PC_CONFIDENCE_DATA)
} |
| | The PointCloudCompositeType enum. More...
|
| |
| enum | yarp::sig::PointCloudBorderTrait : std::int32_t {
yarp::sig::BORDER_TRAIT__OBSTACLE_BORDER,
yarp::sig::BORDER_TRAIT__SHADOW_BORDER,
yarp::sig::BORDER_TRAIT__VEIL_POINT,
yarp::sig::BORDER_TRAIT__SHADOW_BORDER_TOP,
yarp::sig::BORDER_TRAIT__SHADOW_BORDER_RIGHT,
yarp::sig::BORDER_TRAIT__SHADOW_BORDER_BOTTOM,
yarp::sig::BORDER_TRAIT__SHADOW_BORDER_LEFT,
yarp::sig::BORDER_TRAIT__OBSTACLE_BORDER_TOP,
yarp::sig::BORDER_TRAIT__OBSTACLE_BORDER_RIGHT,
yarp::sig::BORDER_TRAIT__OBSTACLE_BORDER_BOTTOM,
yarp::sig::BORDER_TRAIT__OBSTACLE_BORDER_LEFT,
yarp::sig::BORDER_TRAIT__VEIL_POINT_TOP,
yarp::sig::BORDER_TRAIT__VEIL_POINT_RIGHT,
yarp::sig::BORDER_TRAIT__VEIL_POINT_BOTTOM,
yarp::sig::BORDER_TRAIT__VEIL_POINT_LEFT
} |
| |



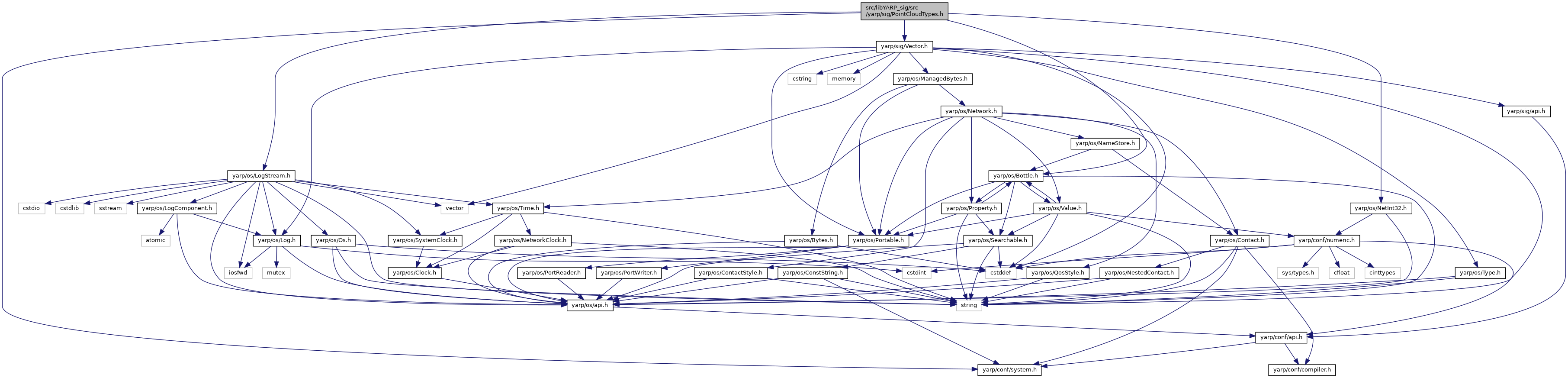
 Include dependency graph for PointCloudTypes.h:
Include dependency graph for PointCloudTypes.h: