#include <multipleAnalogSensorsMsgs/idl_generated_code/SensorMetadata.h>
Definition at line 55 of file SensorMetadata.h.
◆ Editor() [1/4]
| SensorMetadata::Editor::Editor |
( |
| ) |
|
◆ Editor() [2/4]
◆ ~Editor()
| SensorMetadata::Editor::~Editor |
( |
| ) |
|
|
override |
◆ Editor() [3/4]
| SensorMetadata::Editor::Editor |
( |
const Editor & |
rhs | ) |
|
|
delete |
◆ Editor() [4/4]
| SensorMetadata::Editor::Editor |
( |
Editor && |
rhs | ) |
|
|
delete |
◆ begin()
| void SensorMetadata::Editor::begin |
( |
| ) |
|
|
inline |
◆ clean()
| void SensorMetadata::Editor::clean |
( |
| ) |
|
◆ did_set_additionalMetadata()
| bool SensorMetadata::Editor::did_set_additionalMetadata |
( |
| ) |
|
|
virtual |
◆ did_set_frameName()
| bool SensorMetadata::Editor::did_set_frameName |
( |
| ) |
|
|
virtual |
◆ did_set_name()
| bool SensorMetadata::Editor::did_set_name |
( |
| ) |
|
|
virtual |
◆ edit()
| bool SensorMetadata::Editor::edit |
( |
SensorMetadata & |
obj, |
|
|
bool |
dirty = true |
|
) |
| |
◆ end()
| void SensorMetadata::Editor::end |
( |
| ) |
|
|
inline |
◆ get_additionalMetadata()
| const std::string & SensorMetadata::Editor::get_additionalMetadata |
( |
| ) |
const |
◆ get_frameName()
| const std::string & SensorMetadata::Editor::get_frameName |
( |
| ) |
const |
◆ get_name()
| const std::string & SensorMetadata::Editor::get_name |
( |
| ) |
const |
◆ isValid()
| bool SensorMetadata::Editor::isValid |
( |
| ) |
const |
◆ operator=() [1/2]
| Editor& SensorMetadata::Editor::operator= |
( |
const Editor & |
rhs | ) |
|
|
delete |
◆ operator=() [2/2]
◆ read()
Read this object from a network connection.
Override this for your particular class.
- Parameters
-
| reader | an interface to the network connection for reading |
- Returns
- true iff the object is successfully read
Implements yarp::os::PortReader.
Definition at line 250 of file SensorMetadata.cpp.
◆ set_additionalMetadata()
| void SensorMetadata::Editor::set_additionalMetadata |
( |
const std::string & |
additionalMetadata | ) |
|
◆ set_frameName()
| void SensorMetadata::Editor::set_frameName |
( |
const std::string & |
frameName | ) |
|
◆ set_name()
| void SensorMetadata::Editor::set_name |
( |
const std::string & |
name | ) |
|
◆ start_editing()
| void SensorMetadata::Editor::start_editing |
( |
| ) |
|
◆ state()
◆ stop_editing()
| void SensorMetadata::Editor::stop_editing |
( |
| ) |
|
◆ will_set_additionalMetadata()
| bool SensorMetadata::Editor::will_set_additionalMetadata |
( |
| ) |
|
|
virtual |
◆ will_set_frameName()
| bool SensorMetadata::Editor::will_set_frameName |
( |
| ) |
|
|
virtual |
◆ will_set_name()
| bool SensorMetadata::Editor::will_set_name |
( |
| ) |
|
|
virtual |
◆ write()
Write this object to a network connection.
Override this for your particular class. Be aware that depending on the nature of the connections a port has, and what protocol they use, and how efficient the YARP implementation is, this method may be called once, twice, or many times, as the result of a single call to Port::write
- Parameters
-
| writer | an interface to the network connection for writing |
- Returns
- true iff the object is successfully written
Implements yarp::os::PortWriter.
Definition at line 383 of file SensorMetadata.cpp.
The documentation for this class was generated from the following files:



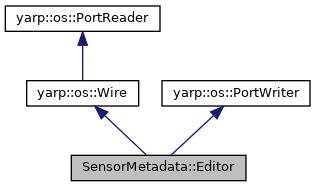
 Inheritance diagram for SensorMetadata::Editor:
Inheritance diagram for SensorMetadata::Editor: