|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
Interface implemented by all objects that can read themselves from the network, such as Bottle objects. More...
#include <yarp/os/PortReader.h>
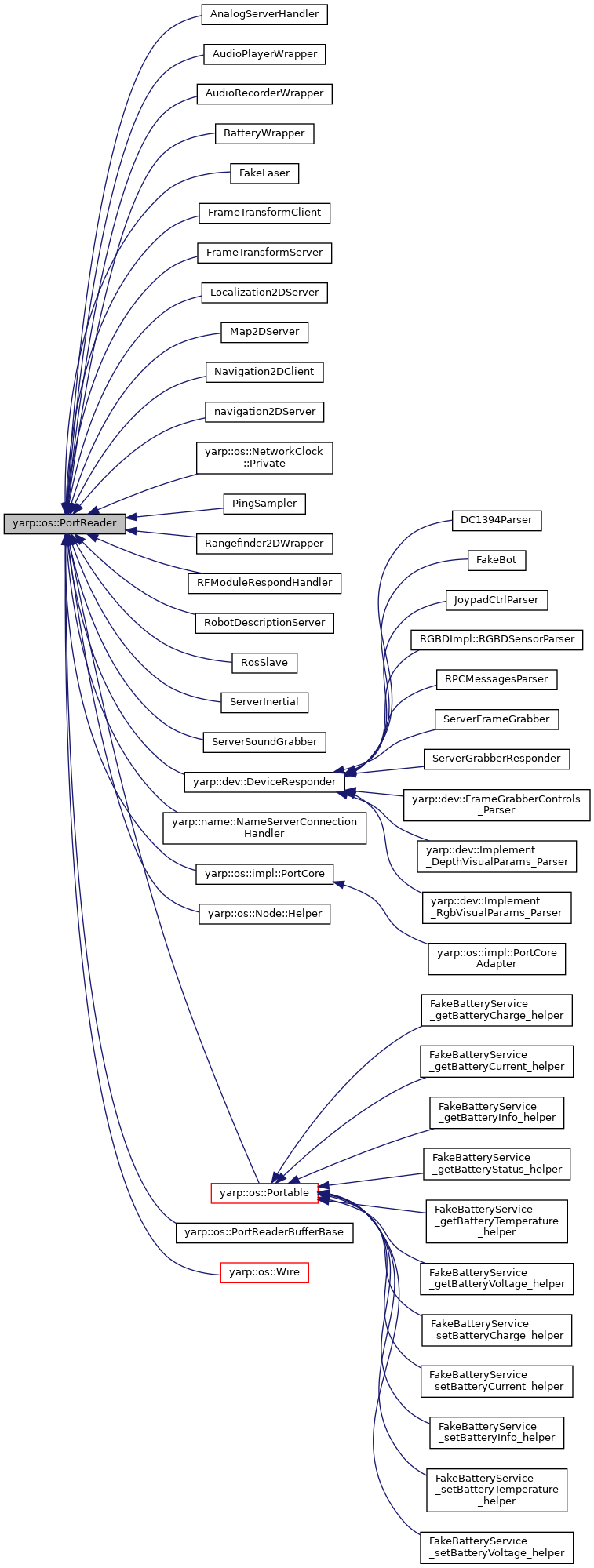
 Inheritance diagram for yarp::os::PortReader:
Inheritance diagram for yarp::os::PortReader:Public Member Functions | |
| virtual | ~PortReader () |
| Destructor. More... | |
| virtual bool | read (ConnectionReader &reader)=0 |
| Read this object from a network connection. More... | |
| virtual Type | getReadType () const |
Interface implemented by all objects that can read themselves from the network, such as Bottle objects.
Definition at line 27 of file PortReader.h.
|
virtualdefault |
Destructor.
|
virtual |
Reimplemented in yarp::sig::Image.
Definition at line 15 of file PortReader.cpp.
|
pure virtual |
Read this object from a network connection.
Override this for your particular class.
| reader | an interface to the network connection for reading |
Implemented in yarp::sig::IntrinsicParams, yarp::os::impl::PortCore, yarp::os::impl::PortCommand, yarp::os::idl::UnwrappedView< T >, yarp::os::idl::Unwrapped< T >, yarp::name::NameServerConnectionHandler, yarp::dev::Nav2D::Map2DPath, yarp::dev::Nav2D::Map2DLocation, yarp::dev::AudioBufferSize, RosSlave, yarp::sig::PointCloudBase, yarp::sig::VectorBase, yarp::sig::Sound, yarp::sig::PointCloud< T >, yarp::sig::Matrix, yarp::sig::Image, yarp::rosmsg::visualization_msgs::MenuEntry, yarp::rosmsg::visualization_msgs::MarkerArray, yarp::rosmsg::visualization_msgs::Marker, yarp::rosmsg::visualization_msgs::InteractiveMarkerUpdate, yarp::rosmsg::visualization_msgs::InteractiveMarkerPose, yarp::rosmsg::visualization_msgs::InteractiveMarkerInit, yarp::rosmsg::visualization_msgs::InteractiveMarkerFeedback, yarp::rosmsg::visualization_msgs::InteractiveMarkerControl, yarp::rosmsg::visualization_msgs::InteractiveMarker, yarp::rosmsg::visualization_msgs::ImageMarker, yarp::rosmsg::trajectory_msgs::MultiDOFJointTrajectoryPoint, yarp::rosmsg::trajectory_msgs::MultiDOFJointTrajectory, yarp::rosmsg::trajectory_msgs::JointTrajectoryPoint, yarp::rosmsg::trajectory_msgs::JointTrajectory, yarp::rosmsg::TickTime, yarp::rosmsg::TickDuration, yarp::rosmsg::tf2_msgs::TFMessage, yarp::rosmsg::tf2_msgs::TF2Error, yarp::rosmsg::tf2_msgs::FrameGraphReply, yarp::rosmsg::tf2_msgs::FrameGraph, yarp::rosmsg::tf::tfMessage, yarp::rosmsg::tf::FrameGraphReply, yarp::rosmsg::tf::FrameGraph, yarp::rosmsg::stereo_msgs::DisparityImage, yarp::rosmsg::std_msgs::UInt8MultiArray, yarp::rosmsg::std_msgs::UInt8, yarp::rosmsg::std_msgs::UInt64MultiArray, yarp::rosmsg::std_msgs::UInt64, yarp::rosmsg::std_msgs::UInt32MultiArray, yarp::rosmsg::std_msgs::UInt32, yarp::rosmsg::std_msgs::UInt16MultiArray, yarp::rosmsg::std_msgs::UInt16, yarp::rosmsg::std_msgs::Time, yarp::rosmsg::std_msgs::String, yarp::rosmsg::std_msgs::MultiArrayLayout, yarp::rosmsg::std_msgs::MultiArrayDimension, yarp::rosmsg::std_msgs::Int8MultiArray, yarp::rosmsg::std_msgs::Int8, yarp::rosmsg::std_msgs::Int64MultiArray, yarp::rosmsg::std_msgs::Int64, yarp::rosmsg::std_msgs::Int32MultiArray, yarp::rosmsg::std_msgs::Int32, yarp::rosmsg::std_msgs::Int16MultiArray, yarp::rosmsg::std_msgs::Int16, yarp::rosmsg::std_msgs::Header, yarp::rosmsg::std_msgs::Float64MultiArray, yarp::rosmsg::std_msgs::Float64, yarp::rosmsg::std_msgs::Float32MultiArray, yarp::rosmsg::std_msgs::Float32, yarp::rosmsg::std_msgs::Empty, yarp::rosmsg::std_msgs::Duration, yarp::rosmsg::std_msgs::ColorRGBA, yarp::rosmsg::std_msgs::Char, yarp::rosmsg::std_msgs::ByteMultiArray, yarp::rosmsg::std_msgs::Byte, yarp::rosmsg::std_msgs::Bool, yarp::rosmsg::shape_msgs::SolidPrimitive, yarp::rosmsg::shape_msgs::Plane, yarp::rosmsg::shape_msgs::MeshTriangle, yarp::rosmsg::shape_msgs::Mesh, yarp::rosmsg::sensor_msgs::TimeReference, yarp::rosmsg::sensor_msgs::Temperature, yarp::rosmsg::sensor_msgs::SetCameraInfoReply, yarp::rosmsg::sensor_msgs::SetCameraInfo, yarp::rosmsg::sensor_msgs::RelativeHumidity, yarp::rosmsg::sensor_msgs::RegionOfInterest, yarp::rosmsg::sensor_msgs::Range, yarp::rosmsg::sensor_msgs::PointField, yarp::rosmsg::sensor_msgs::PointCloud2, yarp::rosmsg::sensor_msgs::PointCloud, yarp::rosmsg::sensor_msgs::NavSatStatus, yarp::rosmsg::sensor_msgs::NavSatFix, yarp::rosmsg::sensor_msgs::MultiEchoLaserScan, yarp::rosmsg::sensor_msgs::MultiDOFJointState, yarp::rosmsg::sensor_msgs::MagneticField, yarp::rosmsg::sensor_msgs::LaserScan, yarp::rosmsg::sensor_msgs::LaserEcho, yarp::rosmsg::sensor_msgs::JoyFeedbackArray, yarp::rosmsg::sensor_msgs::JoyFeedback, yarp::rosmsg::sensor_msgs::Joy, yarp::rosmsg::sensor_msgs::JointState, yarp::rosmsg::sensor_msgs::Imu, yarp::rosmsg::sensor_msgs::Image, yarp::rosmsg::sensor_msgs::Illuminance, yarp::rosmsg::sensor_msgs::FluidPressure, yarp::rosmsg::sensor_msgs::CompressedImage, yarp::rosmsg::sensor_msgs::ChannelFloat32, yarp::rosmsg::sensor_msgs::CameraInfo, yarp::rosmsg::sensor_msgs::BatteryState, yarp::rosmsg::nav_msgs::SetMapReply, yarp::rosmsg::nav_msgs::SetMap, yarp::rosmsg::nav_msgs::Path, yarp::rosmsg::nav_msgs::Odometry, yarp::rosmsg::nav_msgs::OccupancyGrid, yarp::rosmsg::nav_msgs::MapMetaData, yarp::rosmsg::nav_msgs::GridCells, yarp::rosmsg::nav_msgs::GetPlanReply, yarp::rosmsg::nav_msgs::GetPlan, yarp::rosmsg::nav_msgs::GetMapReply, yarp::rosmsg::nav_msgs::GetMap, yarp::rosmsg::geometry_msgs::WrenchStamped, yarp::rosmsg::geometry_msgs::Wrench, yarp::rosmsg::geometry_msgs::Vector3Stamped, yarp::rosmsg::geometry_msgs::Vector3, yarp::rosmsg::geometry_msgs::TwistWithCovarianceStamped, yarp::rosmsg::geometry_msgs::TwistWithCovariance, yarp::rosmsg::geometry_msgs::TwistStamped, yarp::rosmsg::geometry_msgs::Twist, yarp::rosmsg::geometry_msgs::TransformStamped, yarp::rosmsg::geometry_msgs::Transform, yarp::rosmsg::geometry_msgs::QuaternionStamped, yarp::rosmsg::geometry_msgs::Quaternion, yarp::rosmsg::geometry_msgs::PoseWithCovarianceStamped, yarp::rosmsg::geometry_msgs::PoseWithCovariance, yarp::rosmsg::geometry_msgs::PoseStamped, yarp::rosmsg::geometry_msgs::PoseArray, yarp::rosmsg::geometry_msgs::Pose2D, yarp::rosmsg::geometry_msgs::Pose, yarp::rosmsg::geometry_msgs::PolygonStamped, yarp::rosmsg::geometry_msgs::Polygon, yarp::rosmsg::geometry_msgs::PointStamped, yarp::rosmsg::geometry_msgs::Point32, yarp::rosmsg::geometry_msgs::Point, yarp::rosmsg::geometry_msgs::InertiaStamped, yarp::rosmsg::geometry_msgs::Inertia, yarp::rosmsg::geometry_msgs::AccelWithCovarianceStamped, yarp::rosmsg::geometry_msgs::AccelWithCovariance, yarp::rosmsg::geometry_msgs::AccelStamped, yarp::rosmsg::geometry_msgs::Accel, yarp::rosmsg::diagnostic_msgs::SelfTestReply, yarp::rosmsg::diagnostic_msgs::SelfTest, yarp::rosmsg::diagnostic_msgs::KeyValue, yarp::rosmsg::diagnostic_msgs::DiagnosticStatus, yarp::rosmsg::diagnostic_msgs::DiagnosticArray, yarp::rosmsg::diagnostic_msgs::AddDiagnosticsReply, yarp::rosmsg::diagnostic_msgs::AddDiagnostics, yarp::rosmsg::actionlib_msgs::GoalStatusArray, yarp::rosmsg::actionlib_msgs::GoalStatus, yarp::rosmsg::actionlib_msgs::GoalID, yarp::os::SystemInfoSerializer, RFModuleRespondHandler, yarp::os::PortReaderBufferBase, yarp::math::Vec2D< T >, yarp::math::Vec2D< double >, yarp::math::Quaternion, yarp::dev::Nav2D::MapGrid2D, yarp::dev::Nav2D::Map2DArea, yarp::dev::DeviceResponder, yarp::dev::OdometryData6D::Editor, yarp::dev::OdometryData6D, yarp::dev::OdometryData::Editor, yarp::dev::OdometryData, yarp::dev::MobileBaseVelocity::Editor, yarp::dev::MobileBaseVelocity, yarp::dev::Map2DPathData::Editor, yarp::dev::Map2DPathData, yarp::dev::Map2DLocationData::Editor, yarp::dev::Map2DLocationData, yarp::dev::LaserScan2D::Editor, yarp::dev::LaserScan2D, yarp::dev::impl::jointData::Editor, yarp::dev::impl::jointData, yarp::dev::audioBufferSizeData::Editor, yarp::dev::audioBufferSizeData, FrameTransformClient, ServerSoundGrabber, ServerInertial, RobotDescriptionServer, navigation2DServer, Navigation2DClient, SensorStreamingData::Editor, SensorStreamingData, SensorRPCData::Editor, SensorRPCData, SensorMetadata::Editor, SensorMetadata, SensorMeasurements::Editor, SensorMeasurements, SensorMeasurement::Editor, SensorMeasurement, MultipleAnalogSensorsMetadata, MultipleAnalogSensorsMetadata_getMetadata_helper, Localization2DServer, JoyData, FakeLaser, FakeBatteryService, FakeBatteryService_getBatteryTemperature_helper, FakeBatteryService_getBatteryInfo_helper, FakeBatteryService_getBatteryStatus_helper, FakeBatteryService_getBatteryCharge_helper, FakeBatteryService_getBatteryCurrent_helper, FakeBatteryService_getBatteryVoltage_helper, FakeBatteryService_setBatteryTemperature_helper, FakeBatteryService_setBatteryInfo_helper, FakeBatteryService_setBatteryCharge_helper, FakeBatteryService_setBatteryCurrent_helper, FakeBatteryService_setBatteryVoltage_helper, AudioRecorderWrapper, AnalogServerHandler, yarp::math::Vec2D< T >, yarp::math::Vec2D< double >, yarp::math::Vec2D< T >, yarp::math::Vec2D< double >, yarp::math::Vec2D< T >, yarp::math::Vec2D< double >, yarp::os::Portable, yarp::os::Property, yarp::os::Node::Helper, yarp::os::NetworkClock::Private, yarp::os::ManagedBytes, yarp::os::impl::PortCoreAdapter, yarp::os::Bottle, yarp::os::Value, yarp::os::Stamp, yarp::os::PortablePair< HEAD, BODY >, PingSampler, yarp::os::impl::Storable, and yarp::os::BinPortable< T >.