#include <yarp/rosmsg/sensor_msgs/PointField.h>
|
| static const std::uint8_t | INT8 = 1 |
| |
| static const std::uint8_t | UINT8 = 2 |
| |
| static const std::uint8_t | INT16 = 3 |
| |
| static const std::uint8_t | UINT16 = 4 |
| |
| static const std::uint8_t | INT32 = 5 |
| |
| static const std::uint8_t | UINT32 = 6 |
| |
| static const std::uint8_t | FLOAT32 = 7 |
| |
| static const std::uint8_t | FLOAT64 = 8 |
| |
| static constexpr const char * | typeName = "sensor_msgs/PointField" |
| |
| static constexpr const char * | typeChecksum = "268eacb2962780ceac86cbd17e328150" |
| |
| static constexpr const char * | typeText |
| |
Definition at line 43 of file PointField.h.
◆ bottleStyle
◆ rosStyle
◆ PointField()
| yarp::rosmsg::sensor_msgs::PointField::PointField |
( |
| ) |
|
|
inline |
◆ clear()
| void yarp::rosmsg::sensor_msgs::PointField::clear |
( |
| ) |
|
|
inline |
◆ getType()
| yarp::os::Type yarp::rosmsg::sensor_msgs::PointField::getType |
( |
| ) |
const |
|
inlineoverridevirtual |
◆ read()
Read this object from a network connection.
Override this for your particular class.
- Parameters
-
| reader | an interface to the network connection for reading |
- Returns
- true iff the object is successfully read
Implements yarp::os::Portable.
Definition at line 145 of file PointField.h.
◆ readBare()
◆ readBottle()
◆ write()
Write this object to a network connection.
Override this for your particular class. Be aware that depending on the nature of the connections a port has, and what protocol they use, and how efficient the YARP implementation is, this method may be called once, twice, or many times, as the result of a single call to Port::write
- Parameters
-
| writer | an interface to the network connection for writing |
- Returns
- true iff the object is successfully written
Implements yarp::os::Portable.
Definition at line 196 of file PointField.h.
◆ writeBare()
◆ writeBottle()
◆ count
| std::uint32_t yarp::rosmsg::sensor_msgs::PointField::count |
◆ datatype
| std::uint8_t yarp::rosmsg::sensor_msgs::PointField::datatype |
◆ FLOAT32
| const std::uint8_t yarp::rosmsg::sensor_msgs::PointField::FLOAT32 = 7 |
|
static |
◆ FLOAT64
| const std::uint8_t yarp::rosmsg::sensor_msgs::PointField::FLOAT64 = 8 |
|
static |
◆ INT16
| const std::uint8_t yarp::rosmsg::sensor_msgs::PointField::INT16 = 3 |
|
static |
◆ INT32
| const std::uint8_t yarp::rosmsg::sensor_msgs::PointField::INT32 = 5 |
|
static |
◆ INT8
| const std::uint8_t yarp::rosmsg::sensor_msgs::PointField::INT8 = 1 |
|
static |
◆ name
| std::string yarp::rosmsg::sensor_msgs::PointField::name |
◆ offset
| std::uint32_t yarp::rosmsg::sensor_msgs::PointField::offset |
◆ typeChecksum
| constexpr const char* yarp::rosmsg::sensor_msgs::PointField::typeChecksum = "268eacb2962780ceac86cbd17e328150" |
|
staticconstexpr |
◆ typeName
| constexpr const char* yarp::rosmsg::sensor_msgs::PointField::typeName = "sensor_msgs/PointField" |
|
staticconstexpr |
◆ typeText
| constexpr const char* yarp::rosmsg::sensor_msgs::PointField::typeText |
|
staticconstexpr |
Initial value:= "\
# This message holds the description of one point entry in the\n\
# PointCloud2 message format.\n\
uint8 INT8 = 1\n\
uint8 UINT8 = 2\n\
uint8 INT16 = 3\n\
uint8 UINT16 = 4\n\
uint8 INT32 = 5\n\
uint8 UINT32 = 6\n\
uint8 FLOAT32 = 7\n\
uint8 FLOAT64 = 8\n\
\n\
string name # Name of field\n\
uint32 offset # Offset from start of point struct\n\
uint8 datatype # Datatype enumeration, see above\n\
uint32 count # How many elements in the field\n\
"
Definition at line 214 of file PointField.h.
◆ UINT16
| const std::uint8_t yarp::rosmsg::sensor_msgs::PointField::UINT16 = 4 |
|
static |
◆ UINT32
| const std::uint8_t yarp::rosmsg::sensor_msgs::PointField::UINT32 = 6 |
|
static |
◆ UINT8
| const std::uint8_t yarp::rosmsg::sensor_msgs::PointField::UINT8 = 2 |
|
static |
The documentation for this class was generated from the following file:
- src/libYARP_rosmsg/src/idl_generated_code/yarp/rosmsg/sensor_msgs/PointField.h



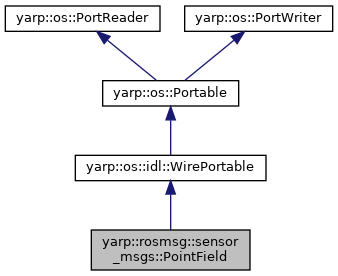
 Inheritance diagram for yarp::rosmsg::sensor_msgs::PointField:
Inheritance diagram for yarp::rosmsg::sensor_msgs::PointField: