|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
Interface implemented by all objects that can write themselves to the network, such as Bottle objects. More...
#include <yarp/os/PortWriter.h>
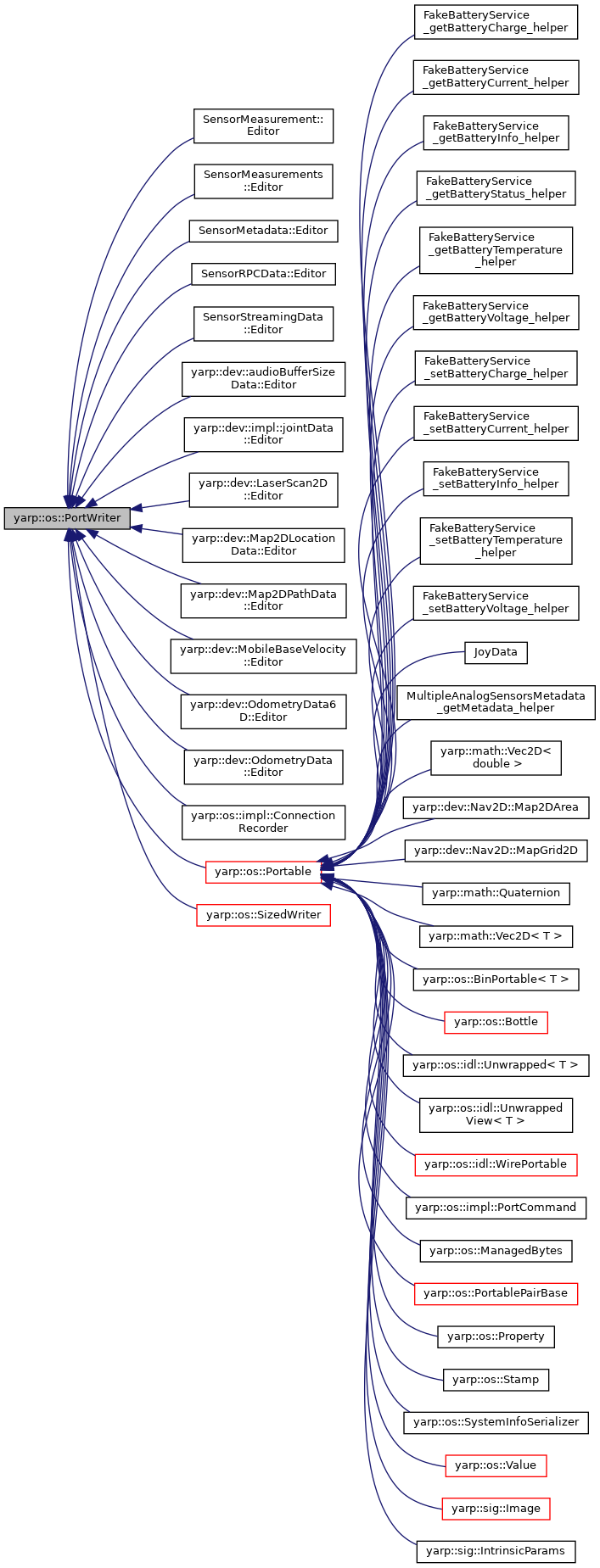
 Inheritance diagram for yarp::os::PortWriter:
Inheritance diagram for yarp::os::PortWriter:Public Member Functions | |
| virtual | ~PortWriter () |
| Destructor. More... | |
| virtual bool | write (ConnectionWriter &writer) const =0 |
| Write this object to a network connection. More... | |
| virtual void | onCompletion () const |
| This is called when the port has finished all writing operations. More... | |
| virtual void | onCommencement () const |
| This is called when the port is about to begin writing operations. More... | |
| virtual yarp::os::Type | getWriteType () const |
Interface implemented by all objects that can write themselves to the network, such as Bottle objects.
Definition at line 26 of file PortWriter.h.
|
virtualdefault |
Destructor.
|
virtual |
Definition at line 24 of file PortWriter.cpp.
|
virtual |
This is called when the port is about to begin writing operations.
After this point, the write method may be called zero, once, or many times by YARP depending on the mix of formats and protocols in use.
Reimplemented in yarp::os::Bottle.
Definition at line 20 of file PortWriter.cpp.
|
virtual |
This is called when the port has finished all writing operations.
Reimplemented in yarp::os::PortablePair< HEAD, BODY >.
Definition at line 16 of file PortWriter.cpp.
|
pure virtual |
Write this object to a network connection.
Override this for your particular class. Be aware that depending on the nature of the connections a port has, and what protocol they use, and how efficient the YARP implementation is, this method may be called once, twice, or many times, as the result of a single call to Port::write
| writer | an interface to the network connection for writing |
Implemented in yarp::sig::PointCloudBase, yarp::sig::PointCloud< T >, yarp::sig::IntrinsicParams, yarp::os::impl::PortCommand, yarp::os::idl::UnwrappedView< T >, yarp::os::idl::Unwrapped< T >, yarp::dev::Nav2D::Map2DPath, yarp::dev::Nav2D::Map2DLocation, yarp::dev::AudioBufferSize, yarp::sig::VectorBase, yarp::sig::Sound, yarp::sig::Matrix, yarp::sig::Image, yarp::rosmsg::visualization_msgs::MenuEntry, yarp::rosmsg::visualization_msgs::MarkerArray, yarp::rosmsg::visualization_msgs::Marker, yarp::rosmsg::visualization_msgs::InteractiveMarkerUpdate, yarp::rosmsg::visualization_msgs::InteractiveMarkerPose, yarp::rosmsg::visualization_msgs::InteractiveMarkerInit, yarp::rosmsg::visualization_msgs::InteractiveMarkerFeedback, yarp::rosmsg::visualization_msgs::InteractiveMarkerControl, yarp::rosmsg::visualization_msgs::InteractiveMarker, yarp::rosmsg::visualization_msgs::ImageMarker, yarp::rosmsg::trajectory_msgs::MultiDOFJointTrajectoryPoint, yarp::rosmsg::trajectory_msgs::MultiDOFJointTrajectory, yarp::rosmsg::trajectory_msgs::JointTrajectoryPoint, yarp::rosmsg::trajectory_msgs::JointTrajectory, yarp::rosmsg::TickTime, yarp::rosmsg::TickDuration, yarp::rosmsg::tf2_msgs::TFMessage, yarp::rosmsg::tf2_msgs::TF2Error, yarp::rosmsg::tf2_msgs::FrameGraphReply, yarp::rosmsg::tf2_msgs::FrameGraph, yarp::rosmsg::tf::tfMessage, yarp::rosmsg::tf::FrameGraphReply, yarp::rosmsg::tf::FrameGraph, yarp::rosmsg::stereo_msgs::DisparityImage, yarp::rosmsg::std_msgs::UInt8MultiArray, yarp::rosmsg::std_msgs::UInt8, yarp::rosmsg::std_msgs::UInt64MultiArray, yarp::rosmsg::std_msgs::UInt64, yarp::rosmsg::std_msgs::UInt32MultiArray, yarp::rosmsg::std_msgs::UInt32, yarp::rosmsg::std_msgs::UInt16MultiArray, yarp::rosmsg::std_msgs::UInt16, yarp::rosmsg::std_msgs::Time, yarp::rosmsg::std_msgs::String, yarp::rosmsg::std_msgs::MultiArrayLayout, yarp::rosmsg::std_msgs::MultiArrayDimension, yarp::rosmsg::std_msgs::Int8MultiArray, yarp::rosmsg::std_msgs::Int8, yarp::rosmsg::std_msgs::Int64MultiArray, yarp::rosmsg::std_msgs::Int64, yarp::rosmsg::std_msgs::Int32MultiArray, yarp::rosmsg::std_msgs::Int32, yarp::rosmsg::std_msgs::Int16MultiArray, yarp::rosmsg::std_msgs::Int16, yarp::rosmsg::std_msgs::Header, yarp::rosmsg::std_msgs::Float64MultiArray, yarp::rosmsg::std_msgs::Float64, yarp::rosmsg::std_msgs::Float32MultiArray, yarp::rosmsg::std_msgs::Float32, yarp::rosmsg::std_msgs::Empty, yarp::rosmsg::std_msgs::Duration, yarp::rosmsg::std_msgs::ColorRGBA, yarp::rosmsg::std_msgs::Char, yarp::rosmsg::std_msgs::ByteMultiArray, yarp::rosmsg::std_msgs::Byte, yarp::rosmsg::std_msgs::Bool, yarp::rosmsg::shape_msgs::SolidPrimitive, yarp::rosmsg::shape_msgs::Plane, yarp::rosmsg::shape_msgs::MeshTriangle, yarp::rosmsg::shape_msgs::Mesh, yarp::rosmsg::sensor_msgs::TimeReference, yarp::rosmsg::sensor_msgs::Temperature, yarp::rosmsg::sensor_msgs::SetCameraInfoReply, yarp::rosmsg::sensor_msgs::SetCameraInfo, yarp::rosmsg::sensor_msgs::RelativeHumidity, yarp::rosmsg::sensor_msgs::RegionOfInterest, yarp::rosmsg::sensor_msgs::Range, yarp::rosmsg::sensor_msgs::PointField, yarp::rosmsg::sensor_msgs::PointCloud2, yarp::rosmsg::sensor_msgs::PointCloud, yarp::rosmsg::sensor_msgs::NavSatStatus, yarp::rosmsg::sensor_msgs::NavSatFix, yarp::rosmsg::sensor_msgs::MultiEchoLaserScan, yarp::rosmsg::sensor_msgs::MultiDOFJointState, yarp::rosmsg::sensor_msgs::MagneticField, yarp::rosmsg::sensor_msgs::LaserScan, yarp::rosmsg::sensor_msgs::LaserEcho, yarp::rosmsg::sensor_msgs::JoyFeedbackArray, yarp::rosmsg::sensor_msgs::JoyFeedback, yarp::rosmsg::sensor_msgs::Joy, yarp::rosmsg::sensor_msgs::JointState, yarp::rosmsg::sensor_msgs::Imu, yarp::rosmsg::sensor_msgs::Image, yarp::rosmsg::sensor_msgs::Illuminance, yarp::rosmsg::sensor_msgs::FluidPressure, yarp::rosmsg::sensor_msgs::CompressedImage, yarp::rosmsg::sensor_msgs::ChannelFloat32, yarp::rosmsg::sensor_msgs::CameraInfo, yarp::rosmsg::sensor_msgs::BatteryState, yarp::rosmsg::nav_msgs::SetMapReply, yarp::rosmsg::nav_msgs::SetMap, yarp::rosmsg::nav_msgs::Path, yarp::rosmsg::nav_msgs::Odometry, yarp::rosmsg::nav_msgs::OccupancyGrid, yarp::rosmsg::nav_msgs::MapMetaData, yarp::rosmsg::nav_msgs::GridCells, yarp::rosmsg::nav_msgs::GetPlanReply, yarp::rosmsg::nav_msgs::GetPlan, yarp::rosmsg::nav_msgs::GetMapReply, yarp::rosmsg::nav_msgs::GetMap, yarp::rosmsg::geometry_msgs::WrenchStamped, yarp::rosmsg::geometry_msgs::Wrench, yarp::rosmsg::geometry_msgs::Vector3Stamped, yarp::rosmsg::geometry_msgs::Vector3, yarp::rosmsg::geometry_msgs::TwistWithCovarianceStamped, yarp::rosmsg::geometry_msgs::TwistWithCovariance, yarp::rosmsg::geometry_msgs::TwistStamped, yarp::rosmsg::geometry_msgs::Twist, yarp::rosmsg::geometry_msgs::TransformStamped, yarp::rosmsg::geometry_msgs::Transform, yarp::rosmsg::geometry_msgs::QuaternionStamped, yarp::rosmsg::geometry_msgs::Quaternion, yarp::rosmsg::geometry_msgs::PoseWithCovarianceStamped, yarp::rosmsg::geometry_msgs::PoseWithCovariance, yarp::rosmsg::geometry_msgs::PoseStamped, yarp::rosmsg::geometry_msgs::PoseArray, yarp::rosmsg::geometry_msgs::Pose2D, yarp::rosmsg::geometry_msgs::Pose, yarp::rosmsg::geometry_msgs::PolygonStamped, yarp::rosmsg::geometry_msgs::Polygon, yarp::rosmsg::geometry_msgs::PointStamped, yarp::rosmsg::geometry_msgs::Point32, yarp::rosmsg::geometry_msgs::Point, yarp::rosmsg::geometry_msgs::InertiaStamped, yarp::rosmsg::geometry_msgs::Inertia, yarp::rosmsg::geometry_msgs::AccelWithCovarianceStamped, yarp::rosmsg::geometry_msgs::AccelWithCovariance, yarp::rosmsg::geometry_msgs::AccelStamped, yarp::rosmsg::geometry_msgs::Accel, yarp::rosmsg::diagnostic_msgs::SelfTestReply, yarp::rosmsg::diagnostic_msgs::SelfTest, yarp::rosmsg::diagnostic_msgs::KeyValue, yarp::rosmsg::diagnostic_msgs::DiagnosticStatus, yarp::rosmsg::diagnostic_msgs::DiagnosticArray, yarp::rosmsg::diagnostic_msgs::AddDiagnosticsReply, yarp::rosmsg::diagnostic_msgs::AddDiagnostics, yarp::rosmsg::actionlib_msgs::GoalStatusArray, yarp::rosmsg::actionlib_msgs::GoalStatus, yarp::rosmsg::actionlib_msgs::GoalID, yarp::os::SystemInfoSerializer, yarp::os::impl::ConnectionRecorder, yarp::math::Vec2D< T >, yarp::math::Vec2D< double >, yarp::math::Quaternion, yarp::dev::Nav2D::MapGrid2D, yarp::dev::Nav2D::Map2DArea, yarp::dev::OdometryData6D::Editor, yarp::dev::OdometryData6D, yarp::dev::OdometryData::Editor, yarp::dev::OdometryData, yarp::dev::MobileBaseVelocity::Editor, yarp::dev::MobileBaseVelocity, yarp::dev::Map2DPathData::Editor, yarp::dev::Map2DPathData, yarp::dev::Map2DLocationData::Editor, yarp::dev::Map2DLocationData, yarp::dev::LaserScan2D::Editor, yarp::dev::LaserScan2D, yarp::dev::impl::jointData::Editor, yarp::dev::impl::jointData, yarp::dev::audioBufferSizeData::Editor, yarp::dev::audioBufferSizeData, SensorStreamingData::Editor, SensorStreamingData, SensorRPCData::Editor, SensorRPCData, SensorMetadata::Editor, SensorMetadata, SensorMeasurements::Editor, SensorMeasurements, SensorMeasurement::Editor, SensorMeasurement, MultipleAnalogSensorsMetadata_getMetadata_helper, JoyData, FakeBatteryService_getBatteryTemperature_helper, FakeBatteryService_getBatteryInfo_helper, FakeBatteryService_getBatteryStatus_helper, FakeBatteryService_getBatteryCharge_helper, FakeBatteryService_getBatteryCurrent_helper, FakeBatteryService_getBatteryVoltage_helper, FakeBatteryService_setBatteryTemperature_helper, FakeBatteryService_setBatteryInfo_helper, FakeBatteryService_setBatteryCharge_helper, FakeBatteryService_setBatteryCurrent_helper, FakeBatteryService_setBatteryVoltage_helper, yarp::math::Vec2D< T >, yarp::math::Vec2D< double >, yarp::math::Vec2D< T >, yarp::math::Vec2D< double >, yarp::math::Vec2D< T >, yarp::math::Vec2D< double >, yarp::os::Portable, yarp::os::Property, yarp::os::ManagedBytes, yarp::os::Bottle, yarp::os::Value, yarp::os::Stamp, yarp::os::SizedWriter, yarp::os::PortablePair< HEAD, BODY >, yarp::os::impl::Storable, yarp::os::impl::BufferedConnectionWriter, and yarp::os::BinPortable< T >.