|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
The PointCloud class. More...
#include <yarp/sig/PointCloud.h>
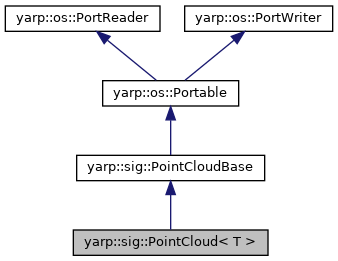
 Inheritance diagram for yarp::sig::PointCloud< T >:
Inheritance diagram for yarp::sig::PointCloud< T >:Public Member Functions | |
| PointCloud () | |
| PointCloud, default constructor. More... | |
| template<class T1 > | |
| PointCloud (const PointCloud< T1 > &alt) | |
| PointCloud, copy constructor. More... | |
| virtual void | resize (size_t width, size_t height) |
| Resize the PointCloud. More... | |
| virtual void | resize (size_t width) |
| Resize the PointCloud. More... | |
| const char * | getRawData () const override |
| Get the pointer to the data. More... | |
| size_t | wireSizeBytes () const override |
| Get the size of the data + the header in terms of number of bytes. More... | |
| size_t | dataSizeBytes () const override |
| Get the size of the data in terms of number of bytes. More... | |
| size_t | size () const override |
| T & | operator() (size_t u, size_t v) |
| Obtain the point given by the (column, row) coordinates. More... | |
| const T & | operator() (size_t u, size_t v) const |
| Obtain the point given by the (column, row) coordinates (const version). More... | |
| T & | operator() (size_t i) |
| Obtain the point given by the index. More... | |
| const T & | operator() (size_t i) const |
| Obtain the point given by the index (const version). More... | |
| template<class T1 > | |
| const PointCloud< T > & | operator= (const PointCloud< T1 > &alt) |
| Assignment operator. More... | |
| PointCloud< T > & | operator+= (const PointCloud< T > &rhs) |
| Concatenate a point cloud to the current cloud. More... | |
| const PointCloud< T > | operator+ (const PointCloud< T > &rhs) |
| Concatenate a point cloud to another cloud. More... | |
| void | push_back (const T &pt) |
| Insert a new point in the cloud, at the end of the container. More... | |
| virtual void | clear () |
| Clear the data. More... | |
| virtual void | fromExternalPC (const char *source, int type, size_t width, size_t height, bool isDense=true) |
| Copy the content of an external PointCloud. More... | |
| template<class T1 > | |
| void | copy (const PointCloud< T1 > &alt) |
| Copy operator. More... | |
| bool | read (yarp::os::ConnectionReader &connection) override |
| Read this object from a network connection. More... | |
| bool | write (yarp::os::ConnectionWriter &writer) const override |
| Write this object to a network connection. More... | |
| virtual std::string | toString (int precision=-1, int width=-1) const |
| yarp::os::Bottle | toBottle () const |
| Generate a yarp::os::Bottle filled with the PointCloud data. More... | |
| bool | fromBottle (const yarp::os::Bottle &bt) |
| Populate the PointCloud from a yarp::os::Bottle. More... | |
| int | getBottleTag () const override |
| Public Member Functions inherited from yarp::sig::PointCloudBase | |
| virtual | ~PointCloudBase ()=default |
| virtual size_t | height () const |
| virtual size_t | width () const |
| virtual int | getPointType () const |
| yarp::os::Type | getType () const override |
| virtual bool | isOrganized () const |
| virtual bool | isDense () const |
| Public Member Functions inherited from yarp::os::PortReader | |
| virtual | ~PortReader () |
| Destructor. More... | |
| virtual Type | getReadType () const |
| Public Member Functions inherited from yarp::os::PortWriter | |
| virtual | ~PortWriter () |
| Destructor. More... | |
| virtual void | onCompletion () const |
| This is called when the port has finished all writing operations. More... | |
| virtual void | onCommencement () const |
| This is called when the port is about to begin writing operations. More... | |
| virtual yarp::os::Type | getWriteType () const |
Additional Inherited Members | |
| Static Public Member Functions inherited from yarp::os::Portable | |
| static bool | copyPortable (const PortWriter &writer, PortReader &reader) |
| Copy one portable to another, via writing and reading. More... | |
| Protected Member Functions inherited from yarp::sig::PointCloudBase | |
| PointCloudBase ()=default | |
| virtual void | copyFromRawData (const char *dst, const char *source, std::vector< int > &recipe) |
| virtual std::vector< int > | getComposition (int type_composite) const |
| virtual size_t | pointType2Size (int type) const |
| virtual size_t | getOffset (int type_composite, int type_basic) const |
| Protected Attributes inherited from yarp::sig::PointCloudBase | |
| yarp::sig::PointCloudNetworkHeader | header |
The PointCloud class.
Definition at line 26 of file PointCloud.h.
|
inline |
PointCloud, default constructor.
Definition at line 41 of file PointCloud.h.
|
inline |
PointCloud, copy constructor.
Clones the content of another point cloud.
| alt | the point cloud to clone. |
Definition at line 53 of file PointCloud.h.
|
inlinevirtual |
Clear the data.
Definition at line 221 of file PointCloud.h.
|
inline |
Copy operator.
clones the content of another point cloud
| alt | the point cloud to clone |
Definition at line 256 of file PointCloud.h.
|
inlineoverridevirtual |
Get the size of the data in terms of number of bytes.
Implements yarp::sig::PointCloudBase.
Definition at line 105 of file PointCloud.h.
|
inline |
Populate the PointCloud from a yarp::os::Bottle.
| [in] | bt,the | yarp::os::Bottle to read from. It has to be formatted in the same way it is generated by the toBottle() method. |
Definition at line 369 of file PointCloud.h.
|
inlinevirtual |
Copy the content of an external PointCloud.
| source,pointer | to the source data. |
| type,enum | representing the type of the source cloud. |
| width,width | of the source cloud. |
| height,height | of the source cloud. |
| isDense |
Definition at line 236 of file PointCloud.h.
|
inlineoverridevirtual |
Implements yarp::sig::PointCloudBase.
Definition at line 393 of file PointCloud.h.
|
inlineoverridevirtual |
Get the pointer to the data.
Implements yarp::sig::PointCloudBase.
Definition at line 85 of file PointCloud.h.
|
inline |
Obtain the point given by the index.
| i,index |
Definition at line 141 of file PointCloud.h.
|
inline |
Obtain the point given by the index (const version).
| i,index |
Definition at line 150 of file PointCloud.h.
|
inline |
Obtain the point given by the (column, row) coordinates.
Only works on organized clouds (those that have height != 1).
| u,column | coordinate |
| v,row | coordinate |
Definition at line 121 of file PointCloud.h.
|
inline |
Obtain the point given by the (column, row) coordinates (const version).
Only works on organized clouds (those that have height != 1).
| u,column | coordinate |
| v,row | coordinate |
Definition at line 132 of file PointCloud.h.
|
inline |
Concatenate a point cloud to another cloud.
| rhs | the cloud to add to the current cloud |
Definition at line 201 of file PointCloud.h.
|
inline |
Concatenate a point cloud to the current cloud.
| rhs | the cloud to add to the current cloud |
Definition at line 174 of file PointCloud.h.
|
inline |
Assignment operator.
Clones the content of another image.
| alt | the image to clone |
Definition at line 161 of file PointCloud.h.
|
inline |
Insert a new point in the cloud, at the end of the container.
| [in] | pt | the point to insert. |
Definition at line 211 of file PointCloud.h.
|
inlineoverridevirtual |
Read this object from a network connection.
Override this for your particular class.
| reader | an interface to the network connection for reading |
Implements yarp::sig::PointCloudBase.
Definition at line 268 of file PointCloud.h.
|
inlinevirtual |
Resize the PointCloud.
| width. |
Definition at line 78 of file PointCloud.h.
|
inlinevirtual |
|
inlineoverridevirtual |
Implements yarp::sig::PointCloudBase.
Definition at line 110 of file PointCloud.h.
|
inline |
Generate a yarp::os::Bottle filled with the PointCloud data.
Definition at line 348 of file PointCloud.h.
|
inlinevirtual |
Definition at line 322 of file PointCloud.h.
|
inlineoverridevirtual |
Get the size of the data + the header in terms of number of bytes.
Implements yarp::sig::PointCloudBase.
Definition at line 95 of file PointCloud.h.
|
inlineoverridevirtual |
Write this object to a network connection.
Override this for your particular class. Be aware that depending on the nature of the connections a port has, and what protocol they use, and how efficient the YARP implementation is, this method may be called once, twice, or many times, as the result of a single call to Port::write
| writer | an interface to the network connection for writing |
Implements yarp::sig::PointCloudBase.
Definition at line 316 of file PointCloud.h.