|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
The IntrinsicParams struct to handle the intrinsic parameter of cameras(RGB and RGBD either). More...
#include <yarp/sig/IntrinsicParams.h>
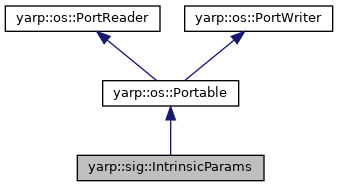
 Inheritance diagram for yarp::sig::IntrinsicParams:
Inheritance diagram for yarp::sig::IntrinsicParams:Classes | |
| struct | DistortionModel |
| The DistortionModel struct representing the distortion model of the camera. More... | |
Public Member Functions | |
| IntrinsicParams () | |
| IntrinsicParams, default constructor. More... | |
| IntrinsicParams (const yarp::os::Property &intrinsic, bool isOptional=false) | |
| IntrinsicParams. More... | |
| void | toProperty (yarp::os::Property &intrinsic) const |
| toProperty, convert the struct to a Property. More... | |
| void | fromProperty (const yarp::os::Property &intrinsic) |
| fromProperty, fill the struct using the data stored in a Property. More... | |
| bool | read (yarp::os::ConnectionReader &reader) override |
| Read this object from a network connection. More... | |
| bool | write (yarp::os::ConnectionWriter &writer) const override |
| Write this object to a network connection. More... | |
| Public Member Functions inherited from yarp::os::Portable | |
| virtual Type | getType () const |
| Public Member Functions inherited from yarp::os::PortReader | |
| virtual | ~PortReader () |
| Destructor. More... | |
| virtual Type | getReadType () const |
| Public Member Functions inherited from yarp::os::PortWriter | |
| virtual | ~PortWriter () |
| Destructor. More... | |
| virtual void | onCompletion () const |
| This is called when the port has finished all writing operations. More... | |
| virtual void | onCommencement () const |
| This is called when the port is about to begin writing operations. More... | |
| virtual yarp::os::Type | getWriteType () const |
Public Attributes | |
| double | physFocalLength |
| Physical focal length of the lens (m) More... | |
| double | principalPointX |
| Horizontal coordinate of the principal point of the image, as a pixel offset from the left edge. More... | |
| double | principalPointY |
| Vertical coordinate of the principal point of the image, as a pixel offset from the top edge. More... | |
| double | focalLengthX |
| Result of the product of the physical focal length(mm) and the size sx of the individual imager elements (pixels per mm) More... | |
| double | focalLengthY |
| Result of the product of the physical focal length(mm) and the size sy of the individual imager elements (pixels per mm) More... | |
| DistortionModel | distortionModel |
| Distortion model of the image. More... | |
| bool | isOptional |
Additional Inherited Members | |
| Static Public Member Functions inherited from yarp::os::Portable | |
| static bool | copyPortable (const PortWriter &writer, PortReader &reader) |
| Copy one portable to another, via writing and reading. More... | |
The IntrinsicParams struct to handle the intrinsic parameter of cameras(RGB and RGBD either).
Definition at line 43 of file IntrinsicParams.h.
| IntrinsicParams::IntrinsicParams | ( | ) |
IntrinsicParams, default constructor.
Definition at line 14 of file IntrinsicParams.cpp.
| IntrinsicParams::IntrinsicParams | ( | const yarp::os::Property & | intrinsic, |
| bool | isOptional = false |
||
| ) |
| intrinsic,Property | containing the value for filling the struct. |
| isOptional,flag | to explicitate if it is optional if this struct is used in parsing. |
Definition at line 18 of file IntrinsicParams.cpp.
| void IntrinsicParams::fromProperty | ( | const yarp::os::Property & | intrinsic | ) |
fromProperty, fill the struct using the data stored in a Property.
| intrinsic[in],input | property. |
Definition at line 44 of file IntrinsicParams.cpp.
|
overridevirtual |
Read this object from a network connection.
Override this for your particular class.
| reader | an interface to the network connection for reading |
Implements yarp::os::Portable.
Definition at line 70 of file IntrinsicParams.cpp.
| void IntrinsicParams::toProperty | ( | yarp::os::Property & | intrinsic | ) | const |
toProperty, convert the struct to a Property.
| intrinsic[out],Property | generated from the struct. |
Definition at line 23 of file IntrinsicParams.cpp.
|
overridevirtual |
Write this object to a network connection.
Override this for your particular class. Be aware that depending on the nature of the connections a port has, and what protocol they use, and how efficient the YARP implementation is, this method may be called once, twice, or many times, as the result of a single call to Port::write
| writer | an interface to the network connection for writing |
Implements yarp::os::Portable.
Definition at line 79 of file IntrinsicParams.cpp.
| DistortionModel yarp::sig::IntrinsicParams::distortionModel |
Distortion model of the image.
Definition at line 102 of file IntrinsicParams.h.
| double yarp::sig::IntrinsicParams::focalLengthX |
Result of the product of the physical focal length(mm) and the size sx of the individual imager elements (pixels per mm)
Definition at line 100 of file IntrinsicParams.h.
| double yarp::sig::IntrinsicParams::focalLengthY |
Result of the product of the physical focal length(mm) and the size sy of the individual imager elements (pixels per mm)
Definition at line 101 of file IntrinsicParams.h.
| bool yarp::sig::IntrinsicParams::isOptional |
Definition at line 103 of file IntrinsicParams.h.
| double yarp::sig::IntrinsicParams::physFocalLength |
Physical focal length of the lens (m)
Definition at line 97 of file IntrinsicParams.h.
| double yarp::sig::IntrinsicParams::principalPointX |
Horizontal coordinate of the principal point of the image, as a pixel offset from the left edge.
Definition at line 98 of file IntrinsicParams.h.
| double yarp::sig::IntrinsicParams::principalPointY |
Vertical coordinate of the principal point of the image, as a pixel offset from the top edge.
Definition at line 99 of file IntrinsicParams.h.